기존의 동역학 기반의 로봇 같은 움직임이 아닌 인간보다 더 나은 움직임을 구현한다는 것을 상상해 보셨습니까.
오늘 인터뷰에서 만나 보실 오세훈 교수(DGIST 로봇 및 기계전자공학과)는 인간과 로봇이 제어를 통해 상호작용하는 것을 목표로 제어 알고리즘, 정확한 움직임을 만들기 위한 구동기, 로봇 구조 설계까지 연구 중 이십니다. 특히 보행 및 이동 보조 시스템, 로봇공학과 생체역학의 융합, 인간 로봇 인터랙션 제어, 모바일 로봇 주행제어 등을 연구하고 계십니다. 연구에 대한 자세한 이야기해보도록 하겠습니다.
1. 현재 교수님께서 하고 계시는 주요 연구에 대한 간단한 소개 부탁드립니다.
모션컨트롤 연구실의 주요 모티베이션은 제어를 통해서 보는 새로운 메커니즘의 개발과 모션의 구현이라고 할 수 있습니다. 로봇이나 메커니즘을 연구하는 연구들이 많이 있지만, 연구실은 모션제어라는 기술을 주축으로 이러한 부분들을 보고 있습니다. 제어를 좀 더 잘하면 지금까지 만들 수 없던 메커니즘과 모션을 만들 수 있지 않을까? 라는 것이 연구의 기본 질문이 되겠습니다.
이러한 질문을 가지고 4가지 연구팀을 구성하여 연구를 진행하고 있습니다.
1) 매니퓰레이터 팀, 2) 4족로봇 팀, 3) 전기자동차 팀, 4) 정밀제어팀이지요. 매니퓰레이터팀은 초고속 초정밀 매니퓰레이터 모션제어를 구현하여, 지금까지 만들지 못했던 로봇팔의 모션을 만들어 내는 것을 목표로 하고 있습니다. 4족 로봇팀은 데이터와 학습보다는 동역학 특징/모델 자체를 잘 설계하여 좀 더 빠른 4족 보행을 구현하는 것을 목표로 하고 있습니다. 전기자동차 팀은 탈 것 으로서의 전기자동차의 특징을 적극적으로 경험할 수 있게 하려면 어떤 메커니즘과 제어가 필요할 것인가를 생각하는 연구를 하고 있습니다. 정밀제어팀은 기존 정밀제어 알고리즘들의 설계와 튜닝에 있어 데이터를 어떻게 잘 활용할 것인가를 연구하는 팀입니다.
팀별로 미팅을 하고 토의 및 실험을 같이 하는 체제를 가지고 연구하고 있습니다.
2. 멀티모달 제어 및 관측을 이용한 로봇의 인간 신체 지능 학습 및 구현 연구에 대한 자세한 설명 부탁드립니다.
인간의 신체활동 중 전문가만이 할 수 있는 신체활동이 있는데, 이러한 고도화된 인간의 모션을 신체지능이라고 볼 수 있습니다. 전문가들이 체화한 이러한 신체 지능을 관측하고 이를 재구현할 수 있는 기술을 개발하는 연구입니다.

다양한 센서를 이용해서 인간의 작업을 측정하고 데이터베이스화 해서 학습할 수 있겠지만, 본 연구에서는 로봇자체를 이러한 신체지능을 측정하고 데이터베이스화 하는 도구로 사용하는 기술을 개발/연구하고 있습니다.
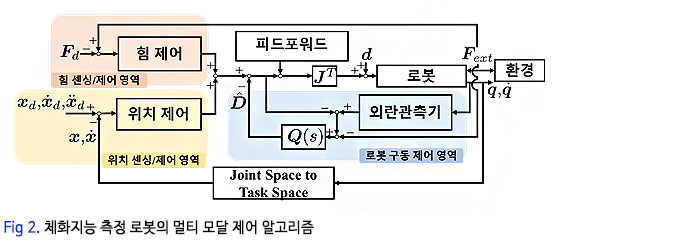
이를 위하여 인간의 작업동작을 좀더 정밀하게 측정할 수 있는 로봇을 개발하였고, 측정한 활동을 구현할 수 있는 제어 알고리즘도 같이 개발하였습니다. 아직은 적용가능한 작업들이 단순하나, 향후 더욱 정교한 작업에 대여 연구를 진행하여 전문기술/예술과 관련된 신체지능을 로봇이 학습하고 구현하는 것을 목표로 하고 있습니다.
3. 제어기설계 자동화를 위한 데이터기반 시스템 특징 추출법 개발이란 무엇인가요?
제어공학의 최근 트렌드의 하나로 자동튜닝 및 최적화가 있습니다. 학문적으로 중요할 뿐만 아니라 산업적으로도 중요한 토픽입니다. 이러한 제어기 설계 자동화 기술을 개발하는 연구로, 국내 한 제어기 회사의 지원을 받아 진행하였습니다.
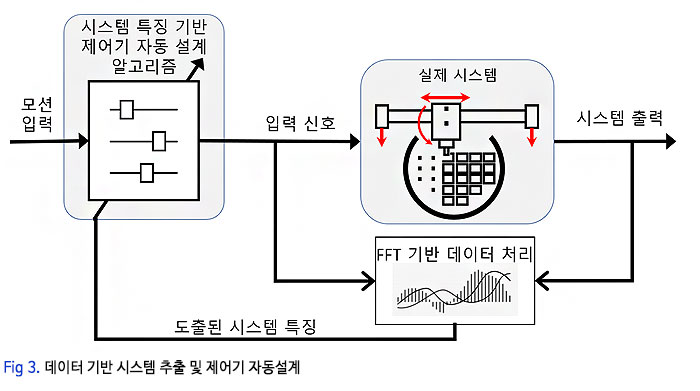
제어 대상이 되는 시스템의 입력, 출력 데이터를 측정하고, 이를 통해서 시스템의 주파수 특성과 그에 기반한 특성 파라미터를 도출하는 알고리즘을 개발하였습니다. 과거에 개발된 알고리즘보다 좀더 정확한 손쉽게 파라미터를 도출할 수 있었습니다. 이렇게 추출한 파라미터를 기반으로 시스템의 특성에 맞는 모델기반 제어기까지 자동으로 설계해주는 알고리즘을 개발하였습니다.
4. 역구동 가능 구동기를 이용한 초고속 이동 가능 다족형 로봇플랫폼 개발도 하셨는데요. 자세한 설명 부탁드립니다.
모션컨트롤 연구실의 주요 연구 토픽중의 하나가 인간기계상호작용에 특화된 구동기와 제어알고리즘을 개발하는 것입니다. 구동기안에 힘을 증폭시키기 위한 감속기가 들어가면 모터의 힘을 증폭시키나 외부에서의 힘에 대해서는 무뎌지고 딱딱하게 움직이게 됩니다. 이러한 문제를 역구동성문제라고 하는데, 원하는 대로 모션을 만들어 내기만 하면 되던 이전의 산업용 모션제어에서는 크게 문제가 되지 않으나, 협업로봇과 같이 외부와 상호작용을 하면서 움직여야 하는 경우는 역구동성 확보가 중요한 기술이 됩니다.
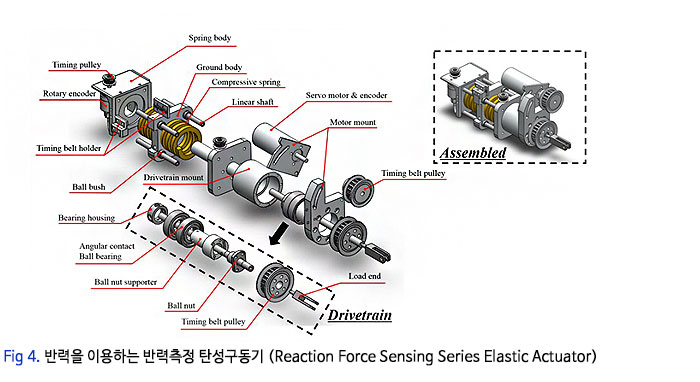
족형 로봇도 지면과 접촉하며 그 상호작용력으로 본체가 움직이는 원리이기 때문에 역구동성이 중요하고, 최근의 많은 사족로봇들이 이문제를 해결하기 위하여 감속비가 낮은 모터를 사용하고 있습니다. 저희 연구실에서는 스프링을 이용하여 역구동성을 확보하는 탄성구동기 (Series Elastic Actuator, SEA)기술들을 확보하고 있습니다. 이러한 탄성구동기를 이용하여 족형로봇을 개발함으로 좀더 정밀한 지면반력생성이 가능하여 동역학 모델을 기반으로 한 4족로봇의 보행제어가 가능하게 됩니다.
5. 고성능 탄성구동기 기반 로봇이용 스포츠 트레이닝 시스템 연구는 어떻게 진행되고 있는 건지 궁금합니다.
탄성구동기를 이용하여 스포츠 트레이닝이 가능한 로봇을 개발하는 연구였습니다. 탄성구동기의 정밀한 상호작용력 생성능력을 이용하여, 로봇을 통한 운동부하를 프로그램하고 만들어 주는 연구였습니다.
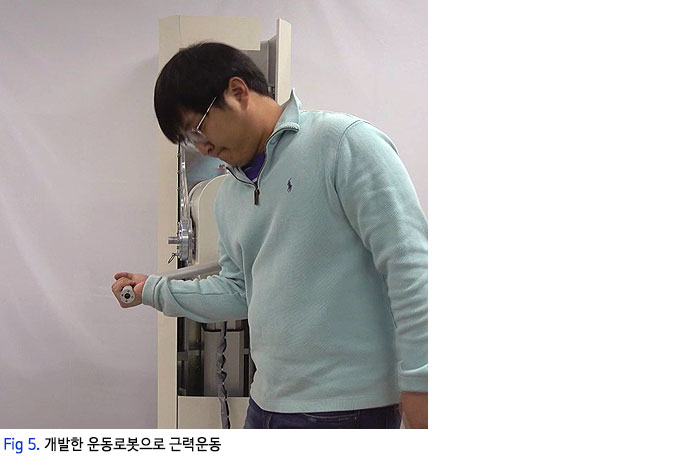
근력강화를 위한 다양한 운동 – 등장성운동, 등척성운동, 등속성운동 –을 각각 힘제어, 위치제어, 속도제어에 매칭하여 상응 제어기를 설계함으로 정확한 운동부하를 프로그램 할 수 있게 하였습니다. 본과제를 담당했던 학생이 현재 대구시내 대학교의 교원이 되어서 이 과제를 좀더 발전시키고 있습니다. 대구시 기업과 같이 사업화도 많이 진행한 것으로 알고 있습니다.
6. 산업용 고정밀 제어기의 데이터 기반 자동최적화 알고리즘 개발에 대한 설명 부탁드립니다.
제어기 자동설계연구의 연속으로, 조금 더 다양한 데이터 기반 시스템 특징 검출 및 제어기 설계를 연구하고 있습니다. 데이터 기반의 제어기 설계는 아무래도 시간영역에서의 평가 및 설계법을 많이 사용하게 되는데, 저희 연구실은 주파수 영역에서의 설계를 방법론으로 취하여 기존의 정밀제어 알고리즘들을 그대로 활용하면서도 데이터 기반 자동 설계가 가능하도록 연구하고 있습니다.

제어기의 데이터 기반 자동최적화는 현재 제어이론쪽에서도 활발하게 연구되는 분야로, 제어관련 학회에 가면 많은 연구가 이루어지고 있음을 확인할 수 있습니다. 로봇쪽은 딥러닝을 이용한 방법론이 거의 주축을 이루고 있으나, 제어공학쪽에서는 다양한 방법론들이 제안되고 있습니다. Gaussian Process를 이용한 확률론적 방법, LMI (Linear Matrix Inequality)를 이용한 최적화, 데이터를 이용하여 MPC (Model Predictive Control)을 설계하는 방법 등, 딥러닝에 의존하지 않는 방법들도 많이 연구되고 있습니다. 모션컨트롤 연구실도 이러한 방법론들로 연구를 하고 있으며, 네덜란드의 Eindhoven University of Technology, 일본의 동경대학교와도 긴밀한 연구토의를 하면서 진행하고 있습니다. 작년에는 박사과정 학생이 Eindhoven University of Technology이 단기 체류를 하면서 공동연구도 이어가고 있습니다.
7. 수행하신 연구에 대한 보완해야할 점은 없는 건지 궁금합니다.
디테일을 본다거나 성능을 본다거나 하면 좀 더 진행하고 싶은 부분들이 많습니다.
8. 사람처럼 움직이는 로봇 프로젝트, 얼마만큼 왔는지 교수님의 견해를 듣고 싶습니다.
제어가 담당할 부분들이 많습니다. 모션의 패턴을 만들어 내거나 플래닝을 하는 부분의 연구와 함께 그러한 패턴과 플래닝된 모션을 구현하는 제어의 연구가 함께 가야하는데, 현재는 사람과 같은 모션을 플래닝하는 쪽에 집중되어 연구가 진행되고 있는 상황입니다. 시뮬레이션상으로 그러한 플래닝이 가능하더라도 로봇이 결국은 그런 모션을 구현할 수가 없는 경우가 많지요. 이는 하드웨어의 제약을 잘 이해한 로봇의 제어가 구현되지 않기 때문일 경우가 많습니다.
예전의 산업용 로봇의 경우는 목적이 확실하여, 작업 목적에 기반한 움직임을 체계적으로 플래닝할 수 있었고, 거기에 특화하여 각 관절을 정확하게 움직여주는 제어를 구현하고 있었습니다. 그러나 요즘은 사람처럼 움직이는 것을 목표로 하다가 보니 사람처럼 움직이는 것이 무엇인지에 대한 연구가 많아졌습니다. 그러나 그러한 움직임에 특화된 제어의 연구는 많이 없지요. 사람처럼 움직이는 동작에 특화된 제어를 연구가 앞으로는 중요한 연구 토픽이 되어야 합니다.
9. 교수님께서 연구할 때 가장 염두에 두시는 부분은 어떤 부분일까요?
먼저 좋은 문제를 찾는 것이겠지요. 어렵고 중요하고 재미있는 문제를 찾는 과정입니다. 자기만족에 빠지는 문제가 아닌 실생활과 산업에 의미를 가지는 문제이면서도 학술적으로도 fundamental한 부분과 연결되어 있는 문제. 그리고 손쉽게 풀리지 않을 만큼 적절하게 어려운 문제를 찾는 것입니다.
그리고는 이러한 문제를 잘 build up 해야 한다는 점입니다. 풀 수 있는 문제를 풀어도 안 되고, 풀 수 없는 문제를 풀어도 안 됩니다. 중요한 문제여서 꼭 풀고 싶은데, 쉽게는 안 풀리는 문제를 발견하는 것입니다. 좋은 문제를 고르는 능력, 혹은 좋은 문제로 만드는 능력은 연구를 보는 센스라고 할 수 있습니다. 이러한 센스가 있느냐 없느냐가 중요합니다.
Oxford대학교 앞 연구의 process를 적어 놓은 벽이 있다고 들었습니다.
Think-Question-Research-Create-Test-Evaluate-Learn-Communicate 라고 적혀있다더군요. 학생들은 주로 evaluate가 되면 연구가 끝났다고 생각을 합니다. 즉 원하는 결과가 실험으로 나오면 된다는 것이지요. 그러나 의미있는 연구란 이러한 단계의 마지막에 있는 두 단계에 주목을 해야합니다.
먼저 learn입니다. 진행한 연구에서 무엇을 배울 수 있는지 음미하는 과정입니다. 단순한 문제 풀이를 위한 연구라면 새롭게 배우는 것이 없겠지요. 특히 누구나 풀 수 있는 문제를 푸는 연구라면, 누구나 할 수 있는 내용의 연구여서 배울 것이 없습니다. 그러나 어렵게 정말 어렵게 풀게되는 연구는, 그 과정을 되돌아 보면서 아, 이게 이런 깊이가 있는 연구였구나 라고 배울 수 있는 연구입니다. 그러한 깊은 배움을 얻을 수 있는 어려운 문제를 찾는 것이 중요합니다. 그리고 마지막으로 그 걸 잘 정리하고 스토리를만들어서 communicate하는 것도 중요하고요.
10. 로봇 강국인 일본에 대해 이야기 안할 수 없을 것 같습니다. 교수님께서 일본에서 학위를 받으셨는데요. 일본과 비교하여 한국의 로봇에 대한 실증적 연구는 어떠한지 궁금합니다.
요즘은 어딜 가나 한국이 대세라는 느낌이 있는데, 로봇의 연구에서도 그러한 분위기입니다. 연구자 수라던지 발표하는 논문의 내용과 양은 한국이 일본이상이라는 느낌을 받을 때도 있습니다. 단 이러한 우열의 비교가 아닌 연구의 차이점만 본다고 하면, 여전히 일본은 일본스러운 연구를 지속하고 있다는 점을 주목해야 합니다. 새롭고 기발한 메커니즘에 대한 연구, 지속적인 정밀도에 대한 추구. 이런 것은 아직도 일본이 장점을 가지는 연구라고 할 수 있습니다. 모노즈꾸리 정신이라고 일본이 말하는 것입니다. 무언가를 만든다는 것 (주로 하드웨어)에 대한 프라이드를 가지고 누가 뭐라고 하든 그 정점에 서보겠다는 마인드입니다. 여기에 비하여 한국은 메커니즘의 개발에 대한 관심은 줄고 빠르게 인공지능과 소프트웨어라는 쪽으로 관심이 시프트되고 있습니다. 좋은 면도 있고 아쉬운 면도 있지요.
11. 연구하는 분야의 국내상황과 국외상황을 구체적으로 비교해주신다면 어떤 실정인가요.
IROS 2023에서 로봇의 제어를 제대로 이야기 해보자는 워크샵을 하나 준비하였습니다. 독일 DLR의 이진오 박사님, Manuel Keppler박사, 미시건 대학교의 Elliott Rouse교수, 미국 스타트업기업 Apptronik의 CTO인 Nicholas Paine박사와 함께입니다.
https://sites.google.com/view/flexible-robots-iros23-ws
사람처럼 유연하면서도 빠른 움직임을 할 때 발생하는 문제들을 동역학과 제어를 가지고 풀어보자는 취지를 가진 사람들이 모여서 이야기를 하는 모임으로 만들었습니다만, 생각보다 이분야에 대한 관심을 가진 사람들이 관심을 표시하며 모이고 있습니다. 로봇제어는, 팔의 경우 독일과 일본이 오랜기간 동안 우위를 가져왔고, 다리의 경우는 미국(과 최근의 ETH를 필두로 하는 유럽)이 우위를 가져왔다고 할 수 있겠습니다. 다리의 제어에 대해서는 KAIST의 우수한 교수님들이 첨단 제어 연구를 진행하셔서 한국도 선진그룹이 되어가고 있습니다만, 매니퓰레이터의 제어는 그닥 연구자들의 관심을 받지 못하고 있습니다. 이는 한국뿐만 아니라 전 세계적으로도 그러하여, 여전히 독일의 그룹이 제안한 방법론들을 따라하고 있는 상황입니다만, 이제 바뀌어야겠지요.
12. 로봇과 인간의 공존을 위한 필수 메카트로닉스 기술은 어떤 것들이 있을까요?
한두가지가 아닐 것입니다. 정말 다양한 분야의 기술들이 잘 모여야겠지요. 센서, 구동기, AI, 인간평가의 학문까지. 그러나, 제어전문가로서의 의견으로 역시 제어기술을 이야기 하고 싶습니다. 왜냐하면, 중요한데 그렇게 평가를 받지 못하고 있는 것 같아서.
13.
연구 진행 중 어려운 점이 있었다면 어떤 점이었으며, 어떻게 해결해 오셨는지 알려주세요.
어디를 cheating하느냐를 찾는 것이지요. 모든 것을 다 만족할 수 있는 정답은 없습니다. 공학은 이학이 아닌 만큼 그 답이 아름답지 않을 수도 있고요. 적당히 포기하고 적당히 더러워지면서도 적절한 선에서 문제를 풀 수 있는 솔루션을 찾는 것입니다. 이걸 더 풀기 위해서 붙잡고 있어야 하는지 아니면 여기서 문제를 변경해야 하는지를 정하는 과정이 어렵습니다. 속 시원하게 이건 안돼라고 판단이 서면 좋은데, 여전히 어딘가 미련이 남을 경우, 그 미련을 어디까지 가져가고 어디까지 포기해야 하느냐. 도출한 솔루션이 지저분할 때, 이걸 어디까지 아름답게 만들 것인지, 어디까지의 추함을 허락하느냐를 정해야 하는 것입니다.
많은 경우 사람들과 만나서 이야기를 나눌 때, 새로운 관점을 발견하는 편입니다. 결국은 관점의 문제가 많은데, 다른 사람들의 관점을 듣다가 보면 풀어오던 문제를 새롭게 재구성할 수도 있게 되는 아이디어를 많이 얻게 됩니다.
14. 이런 연구에 힘입어 앞으로 연구 계획 중인 연구나 또 다른 목표가 있으신지 궁금합니다.
학생들하고 재미삼아 이것저것 해보고 있는데, 사람의 예술적인 면까지 구현해보고 싶은 것인 하나의 목표이고, 4족 로봇이 그렇게 까지 복잡한 시뮬레이션과 최적화를 돌려야만 하는 어려운 문제인가를 생각해 보는 것도 하나의 목표입니다.
15. 앞으로 관련 분야를 공부하는 후학(대학원생들)에게 연구에 대한 비전을 제시해 주신다면.
비전까지는 아니지만 학생들에게 이야기하고 싶은 것은 호기심을 가져라. 그리고 자신의 목소리와 스토리를 가져라는 두 가지 점입니다. 학자란 것은 결국 본인이 궁금해 하는 것을 본인만의 시선을 가지고 풀어나가는 사람입니다. 본인이 궁금해 하는 것이 없다면 학자의 기본자질이 없다는 것이겠지요.
가끔씩 대학원으로 갓 진학한 학생들에게 교수님 지시만 내려주십시오 라는 이야기를 들을 때가 있습니다. 특히 소위 공부를 잘하는 학생일수록 더 그런 경향이 있습니다. 학점을 위해 반드시 찾아야 하는 정답을 교수가 등 뒤에 감추고 있다라는 환경으로 트레이닝을 받아온 탓이겠지요. 그러나 교수는 정답을 가지고 있지 않을 뿐만 아니라 문제를 가지고 있지도 않습니다. 그러니 학생들은 본인이 궁금해 하면서 스스로 문제를 찾아야 합니다. 그것도 몇 번이고 퇴짜를 맞으면서 의미 있고 배울 것이 있는 깊이 있는 문제를 build up해나가야 합니다. (좋은 문제를 찾고 build up하는 센스를 키워나가기 위해서입니다.)
이러한 과정에서 가장 중요한 자질은 호기심입니다. 사물 하나하나를 신기하게 여기고 why 그럴까를 생각해 나가지 못한다면, 교수와 상사와 주변의 눈치를 보는 것이 연구의 동기가 되어버리기 쉽고, 그렇게 되면 진정한 연구자가 될 수 없겠지요. why라는 질문을 소중히 하기 바랍니다. (만약 그런질문이 생기지 않는다면, 그 또한 나는 why 그런 질문을 하지 않는가를 생각해야겠지요) why는 곧 자신만의 이해, 자신만의 스토리를 만들어가는 스타팅 포인트입니다.
이렇게 why 라는 질문으로 시작하여, 두 번째로는 본인만의 스토리를 가져야 합니다. 즉, why라는 질문을 끝까지 추구하여 사물에 대한 자신만의 시선을 가져야 합니다. 국제 학회에서 학생들의 발표를 보면, 미국학생들을 말을 잘하고, 유럽학생들은 visualization을 잘 합니다. 거기에 비하여 한국 학생들은 빡빡한 글자와 수식들에 의존한 발표를 하는 경향이 강합니다. 이런 이유로 한국 학생들의 스토리텔링은 미국과 유럽 학생에 비하여 약하게 다가옵니다. 이러한 경향을 가지는 것은 아마도 긴 역사의 산물이라 생각되지만,결국은 남에게 이야기할 자신만의 스토리가 없다는 것도 하나의 이유가 될 것입니다. 자신의 시선과 관점을 이야기하는 발표가 아닌, 남들에게 인정받을 수 있는 수식과 빡빡한 절차를 소개함으로 인정받으려는 태도로 보이고, 결국은 자신의 스토리가 아닌 남의 스토리를 이야기하고 있다는 느낌을 받게 됩니다.
만약 본인이 build up한 문제에 대한 본인만의 solution이라면, 수식과 실험결과는 수단일 뿐, 그것보다는 자신만의 스토리 자체를 어떻게든 남에게 이를 설득하고자 할 것이고, 이를 위하여 말이나 visualization을 이용하는 스토리텔링을 시도할 것입니다. 사물에 대하여 원리에 대하여 자신만의 납득이 갈 때까지 why 라는 질문을 해서 파고든 다음 본인이 납득할만한 이해를 하고, 본인만의 이해체계에 맞추어 스토리를 만들 수 있어야 합니다.
연구자의 가장 즐거운 점은 자신만의 세상을 만들 수 있다는 것입니다. 그러한 자신의 세상이 타인들의 인정을 받는다면 더할 나위 없이 좋겠지만 그렇지 않더라도 스스로는 만족할 수 있는 자신만의 세상을 차곡차곡 만들어 갈 수 있는 것이 연구자입니다. 끊이지 않는 호기심과 그것에 대한 자신만의 스토리를 만들어 나가며, 그러한 즐거움을 찾아가는 과정을 발견해 나가길 바랍니다.
|




















