


김종혁 교수(홍익대학교 전자전기융합공학과) / jonghoek at hongik.ac.kr
2021-11-15
|
통신기반 군집 로봇 연구는 로봇기술, 통신기술, 컴퓨터 공학, 인공지능 연구 기술 및 알고리즘 연구 기술발전도 촉발시키는 융합기술입니다. 특히 군사용으로 쓰이게 되면 군집 미사일 제어 또는 군집 탐색 로봇 제어 등으로 활용할 수 있는데요. 군집 로봇 제어 기법은 사람이 활동하기 어려운 환경에서 사람을 대신하여 어려운 임무를 수행하는데 쓰입니다. 오늘 인터뷰에서 만나 보실 김종혁 교수(홍익대학교 전자전기융합공학과)는 표적 추적, 제어 이론, 로봇 공학, 다중 에이전트 시스템 및 최적 추정에 관한 연구를 수행하고 있습니다. 최근 퍼듀대 민병철 교수팀과 함께 NASA에서 주최한 ‘스페이스 로보틱스 챌린지 페이즈 2(Space Robotics Challenge Phase 2) 대회에 참가하기도 했는데요. 자율 다수 로봇 시스템에 대해 이야기해보도록 하겠습니다. 1. 현재 교수님께서 하고 계시는 주요 연구에 대한 간단한 소개 부탁드립니다. 표적 추적, 로봇 제어 공학, 인공지능, 다중 에이전트 시스템에 대한 연구를 하고 있습니다. 표적 추적은 여러 센서 정보를 이용하여 표적의 위치와 속도를 추정하는 연구입니다. 로봇 제어 공학은 로봇의 안정성을 유지하면서 로봇을 제어하여 목표로 하는 움직임(예: 도로 주행, 표적 추종)을 수행하도록 하는 제어기법을 개발하는 연구입니다. 다중 에이전트 시스템은 한 대의 로봇 뿐 아니라 여러 대의 로봇을 제어하여 원하는 군집 형태를 이루거나 원하는 임무를 수행하도록 하는 연구입니다. 인공지능은 영상이나 시계열 데이터로부터 자동으로 객체를 찾거나 분류를 수행하는 작업을 하는 연구입니다. 2. 인접한 로봇 간의 통신 신호 측정만을 이용하여 군집 로봇 제어 기법을 제안하셨다고 하는데요. 기존의 방식과 어떻게 다른지 자세한 설명 부탁드립니다. 기존의 군집 로봇 제어 방식은 여러 대의 로봇에 대한 통신을 하나의 노드로 모으고 그 노드를 통해서 모든 로봇을 제어하는 방법입니다. 그렇지만 로봇의 대수가 많아질수록 통신 병목 현상이 발생하고 통신이 원활하지 않은 경우가 발생할 수 있습니다.  또한 정보가 모이는 노드가 고장나거나 해킹을 당할 경우, 전체 시스템에 대한 제어가 불가능해집니다. 따라서 인접한 로봇 간의 통신을 이용하여 군집 로봇을 제어하는 분산 제어 기법을 제안하였습니다. 이 방법을 이용하면 통신 병목 현상을 줄일 수 있고 고장난 로봇이 발생한 경우에도 대처하기 용이하다는 장점이 있습니다. 3. 고장난 로봇이 있을 경우, 전체 군집 로봇 제어가 고장난 로봇의 영향을 받는다고 합니다. 고장난 로봇에 대한 해결방안 무엇인지 궁금합니다. 고장난 로봇을 판단하려면 고장난 로봇을 탐지하는 알고리듬이 필요합니다. 각 로봇은 인접한 로봇의 상태를 모니터링하는 알고리즘을 수행합니다. 인접한 로봇이 고장난 것으로 판단되면 그 로봇을 전체 군집 제어에서 제외하는 방법을 적용할 수 있습니다. 1987년 미국의 컴퓨터그래픽 전문가 크레이그 레이놀즈가 세계 최초로 구현한 군집 알고리듬의 세가지 규칙으로 군집이론의 기본 조건으로 자리 잡았습니다. 너무 가까이 접근하지 않는 분리성, 주변 개체가 이동하는 방향으로 움직이는 정렬성, 서로 너무 멀어지는 것을 피하는 응집성 등입니다. 그러나 군집 알고리듬은 로봇의 운동요소를 고려하지 않았기 때문에 그대로 적용할 수 없습니다. 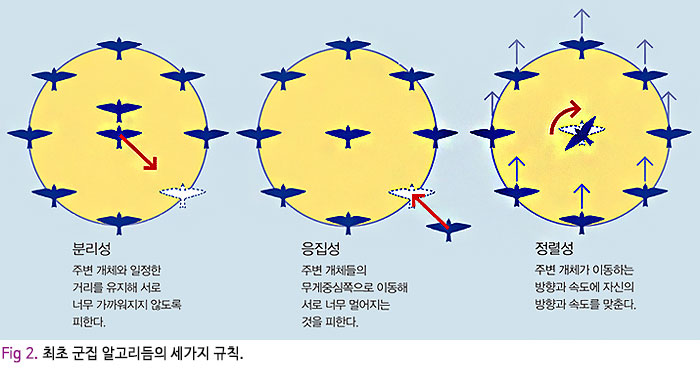 1990년대 중반부터는 로봇공학자들은 물리적 한계를 고려한 포메이션 제어기법을 연구하기 시작하였고 현재 다양한 방법의 연구가 진행되고 있습니다. 4. 군집로봇은 통신장애, 장애물 등 환경적인 제약이 많을 것 같습니다. 실험하시면서 어떤 환경 조건에서 연구가 진행되나요? 군집 로봇을 장애물이 많은 환경에 배치하고 로봇들이 상호 통신을 유지하면서 이동하는 제어 기법을 테스트해 볼 수 있습니다. 장애물은 로봇 간의 상호 통신을 막게 됩니다. 최악의 경우, 통신이 두절되는 로봇은 군집 로봇 제어에서 낙오될 수도 있습니다. 군집 로봇 제어는 통신 두절로 인하여 낙오되는 로봇 없이 군집 로봇이 상호 통신망을 유지하면서 목표지점으로 이동하도록 하는 제어기법입니다. 로봇 위치 추정(항법)은 효과적인 로봇 제어에서 매우 중요한 알고리즘입니다. 따라서 각 로봇의 위치를 직접 측정할 수 있는 GPS와 같은 위치 측위 시스템이 없는 환경에서 군집 로봇을 제어하는 실험을 수행합니다. 5. 강한 로봇 하나보다 단순한 로봇 여러 대가 낫다는 평이 있습니다. 물류로봇, 드론쇼, 군사 분야 등 많이 쓰일 것 같지만 실제 활용은 저조한데요. 교수님의 견해를 듣고 싶습니다. 군집 로봇 분야는 전세계적으로 활발히 연구되는 분야입니다. 로봇 여러 대를 동시 제어하게 되면 한 대의 로봇을 제어하는 경우에 비해서 효과도를 높일 수 있습니다. 예를 들어서, 군집 로봇이 모여서 표적을 향해 움직이는 경우를 고려할 수 있습니다. 이 경우, 표적의 레이더와 같은 센서 체계에 군집 로봇이 한 대의 큰 로봇으로도 인식될 수 있으므로 표적이 각 로봇의 위치를 정확히 측정 못하게 할 수 있습니다. 이러한 방법으로 표적의 센서 체계를 기만할 수 있다는 장점이 있습니다. 또한, 군집 로봇이 동시 다발적으로 표적을 공격할 수 있으므로 표적에 대한 공격 효과도를 크게 증진시킬 수 있습니다. 6. 장애물 정보를 활용하여 Non-Line-Of-Sight (NLOS) 환경에서 발신기의 위치를 추적하는 위치 추정 알고리즘 개발에 대해서 설명 부탁드립니다. 여러 대의 수신기에서 발신기의 신호를 측정하여 역으로 발신기의 위치를 추정하는 문제를 고려하였습니다. 예를 들어서 각 수신기는 발신기가 보내는 신호의 방향을 측정할 수 있습니다. 여러 대의 수신기의 위치를 알고 있다고 하면, 각 수신기에서 측정된 신호들의 모든 방위선이 만나는 위치가 발신기의 위치가 됩니다. 문제는 장애물이 발신기의 신호가 수신기에 도달하는 것을 막을 수 있다는 점입니다. 만일 장애물의 위치 정보를 알고 있다고 하면 이 위치 정보를 활용해서 발신기의 위치를 추정하는 정확도를 향상시킬 수 있습니다. 7. 군집 로봇이 가장 화제가 된 것은 하버드대가 2014년 발표현 킬로봇입니다. 500원짜리 동전 크기에 가느다란 다리가 3개 달린 볼품없는 이 로봇이 무려 1024대라고 하는데요. 알고리즘은 개발단계라고 하지만 상용화가 된다면 대단한 성과일 것 같습니다. 이러한 여러 연구들에 대한 국내 상황과 국외 상황을 구체적으로 비교해주신다면 어떤 실정인가요? 군집 로봇에 대한 많은 연구가 전세계적으로 진행되고 있으나 많은 연구에서 각 로봇의 위치를 실시간으로 직접 측정할 수 있는 GPS나 실내 측위 시스템과 같은 시스템을 이용하였습니다. 로봇 위치 추정은 효과적인 로봇 제어에서 매우 중요한 알고리즘입니다.  따라서 각 로봇의 위치를 직접 측정할 수 있는 GPS와 같은 위치 측위 시스템이 없는 환경에서 군집 로봇을 제어하는 실험을 하는 것이 중요하다고 봅니다. 예를 들어서 수중에서 운행하는 수중 로봇의 경우, GPS 신호를 수신할 수 없으며 이러한 환경에서도 군집 로봇의 위치를 추정하며 동시에 군집 로봇 운용 필요성이 있습니다. 8. 최근 퍼듀대 민병철 교수팀과 함께 NASA에서 주최한 ‘스페이스 로보틱스 챌린지 페이즈 2(Space Robotics Challenge Phase 2) 대회에 참가하기도 했는데요. 교수님께서 생각하시는 우주 탐사를 위한 자율 다수 로봇 시스템 핵심 기술은 무엇인지 궁금합니다. 우주에서는 로봇의 위치를 추정하는 GPS 신호를 이용할 수 없습니다. 로봇의 위치를 실시간으로 추정하는 항법기술이 핵심 기술로 생각됩니다. 로봇의 위치를 실시간으로 추정하는 항법기술이 핵심 기술로 생각됩니다.  9. 이런 연구에 힘입어 앞으로 연구 계획 중인 연구나 또 다른 목표가 있으신지 궁금합니다. 표적 추적, 로봇 제어 공학, 인공지능, 다중 에이전트 시스템에 대한 연구를 계속 발전시키고 싶습니다.  10. 앞으로 관련 분야를 공부하는 후학(대학원생들)에게 이 분야의 연구에 대한 비전을 제시해 주신다면. 표적 추적, 로봇 제어, 인공지능, 다중 에이전트 시스템은 발전 가능성이 큰 연구 분야입니다. 통신 기반 군집 로봇 연구는 로봇 기술, 통신 기술, 컴퓨터 공학, 인공지능 연구 기술 및 알고리즘 연구 기술 발전도 촉발시키는 융합 기술입니다. 로봇과 인공지능은 4차 산업 혁명을 이끄는 중요한 연구입니다. 표적 추적 기술은 군사 분야 뿐 아니라 위치 측위 기술로써도 이용됩니다. |
- control theory
- robotics
- multi-agent robotics
- optimal estimation
- autonomous car




전체댓글 0













