뇌성마비(Cerebral Palsy)는 대개 생후 2세 이전에 발병하는 중추신경계의 손상으로 인해 발생하는 질환이며, 근육을 제어함에 문제가 생김에 따라 뇌성마비 아동은 보행, 근육운동, 손으로 물체를 조작하는 행동 등에 운동 장애와 이를 통해 발생하는 일상생활 활동에서의 많은 어려움들을 평생 겪게 됩니다. 이에 따라 뇌성마비 아동들의 운동 기능을 향상시키고, 독립적인 삶을 살 수 있도록 지원하기 위해 많은 로봇재활 기술들이 연구되고 있습니다. 뇌성마비는 중추신경계의 손상으로 인한 질병이라 다양한 형태의 장애로 나타나기에, 일괄적인 로봇재활보다는 로봇 재활 시 환자들에게 가장 도움이 되는 형태의 맞춤형 재활을 구현할 수 있는 연구와 개발이 필요합니다.
뇌성마비 아동들의 로봇 재활 연구는 환자의 운동능력의 폭이 매우 넓다는 측면에서 어렵지만, 이들에 대한 재활은 나이든 어른들보다 재활에 대한 반응이 빠르고 효과가 크다는 점이 특징입니다. 특히 뇌의 발달 단계에서 재활치료를 받는 것이 매우 중요하기에, 뇌성마비 아동들이 어린 시절부터 꾸준한 재활치료를 받을 경우 일상생활에서의 활동 수행 능력이 크게 개선된다는 것이 많은 연구 결과들로 알려져 있습니다. 다시 말해, 뇌성마비 아동들에 대한 early-intervention, 즉 조기 치료는 매우 중요하다고 할 수 있습니다.
뇌성마비 아동들에 대한 로봇 재활 연구를 수행함에 있어, 뇌성마비 아동들의 기능적인 모빌리티의 다양성을 정확히 이해하는 것은 우선적으로 이루어져야 합니다. 예를 들어, 보행에 있어 뇌성마비 아동의 움직임은 정상적이지는 않지만 자립 보행 자체는 가능한 수준부터, 척추 쪽에도 마비가 심하게 진행되어 전적으로 휠체어에 의존하고 팔을 사용하지 못하는 수준까지 다양합니다. 이에 따라 필자는 독립적인 보행이 가능한 아동을 위한 로봇 시스템부터 휠체어에 의존해야 하는 아동들에게 적합한 로봇 재활 시스템 등을 개발하기 위해 노력해 왔습니다.
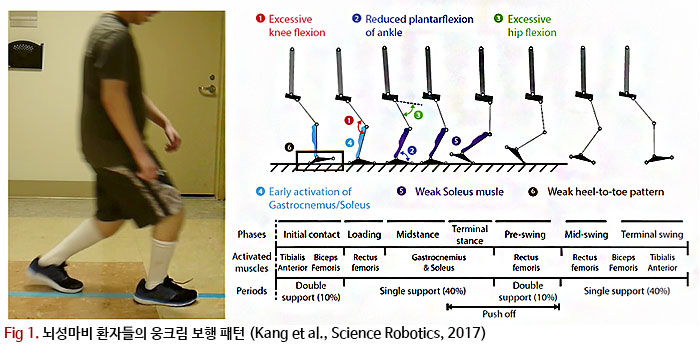
첫번째로 소개하고자 하는 연구는 로봇 기술을 활용하여 어느정도 독립적인 보행이 가능한 뇌성마비 환자들의 건강하지 않은 보행 패턴을 개선하는 연구입니다. 많은 뇌성마비 환자들은 Fig. 1에 나타난 바와 같이 웅크림 보행(crouch gait)을 하며, 이는 발달 초기 뇌손상과 다리 근육의 불균형한 작용으로 인해 발생합니다. 이러한 움직임은 보행 속도를 느리게 하고 상체를 심하게 흔들며, 발앞꿈치로 딛고 엉덩이, 무릎, 발목을 과도하게 굽히는 형태로 관찰됩니다. 이러한 비정상적인 움직임은 시간이 지남에 따라 관절 기능을 더욱 퇴화시켜서 통증 및 뼈의 변화를 일으키므로, 초기에 교정해주는 것이 중요합니다.
웅크림 보행 패턴은 동영상(https://www.science.org/doi/suppl/10.1126/scirobotics.aan2634/suppl_file/aan2634_movie_s1.mp4)을 통해 확인할 수 있습니다.
지금까지 많은 로봇 연구들은 이러한 웅크림 보행을 교정할 때, 로봇에 의해 직접 정상 보행 패턴으로 움직임을 교정해주는 방식으로 이루어졌습니다. 이를 위해서는 발과 관절 각도 및 움직임 궤도를 시간에 따라 제어해야 했기에, 이를 위해 환자의 몸에 하드웨어를 부착하는 엑소스켈레톤 (exoskeleton) 방식으로 연구가 주로 이뤄졌습니다. 하지만 이는 환자의 다리관절마다 constraint를 부과함으로 인하여 불필요한 힘을 주거나 질량이나 관성이 추가되는 문제점들을 가지고 있습니다.
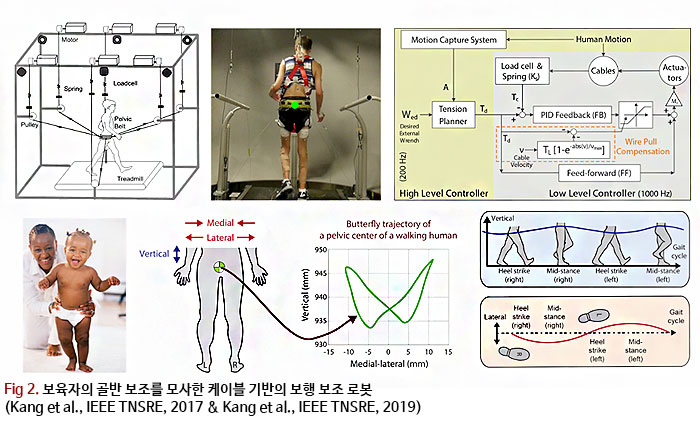
필자의 연구에서는 이러한 인위적인 constraint를 최소화하기 위한 방안으로써, Fig. 2의 왼쪽 아래 부분에 나타나 있는 바와 같이 보육인(caregiver)이 아이의 보행을 보조할 때 그들의 골반에 손을 얹고 도와주는 경우가 많다는 점에 주목하였습니다. 이러한 골반 보조에는 중요한 과학적 원리가 있는데, 첫번째로는 사람이 걸을 때 골반 인근에 사람의 무게 중심이 있다는 것이고 둘째로는 이 무게 중심이 보행 시 시간에 따라 마치 나비(butterfly)와 같은 형태로 6자유도의 움직임(3자유도의 직선운동과 3자유도의 회전운동)을 보인다는 것입니다 (이는 Fig. 2에서 골반 인근에 표기된 녹색 점과 이 녹색점이 나비 형태로 거동하는 그래프를 통해 확인할 수 있음).
그리고 본 실험에서는 환자의 몸에 강체(rigid body) 하드웨어를 부착하는 것이 아니라, 케이블을 골반 인근에 부착하고 이 케이블을 환자의 실시간 움직임에 맞춰 장력을 제어하여 당김으로 환자의 보행을 제어하였습니다. 강체로봇이 아닌 케이블을 이용한 로봇 등을 소프트 로봇(soft robot)이라고 하며, 이렇게 함으로 환자의 몸에 별도의 관성(inertia)을 부과하지 않을뿐더러, 환자의 움직임에 인위적인 제약을 가하지 않는 큰 장점을 가지게 됩니다. 본 케이블 로봇은 보행 시 골반의 나비 형상의 움직임을 원하는 형태로 변형시킴으로 보행 패턴을 다양하게, 심지어 비대칭 형태의 보행까지도, 제어할 수 있다는 것을 필자의 과거 연구들로 보인 바 있습니다.
기존의 로봇 재활 연구는 환자의 비정상적인 보행을 정상적인 보행 패턴으로 직접 움직임을 교정해주는 방향으로 다수 진행되어 왔었습니다. 이러한 보조 (assistive) 방식의 로봇 재활은 독립적인 보행이 많이 어려운 환자들에게 특히 유용한 것으로 알려져 있습니다.
하지만 이번 연구에서는 이렇게 보행의 패턴을 직접 교정해주는 방식이 아니라, 비정상적인 보행의 ‘원인’인 약한 근육을 강화하는 방식으로 비정상 보행을 개선하고자 했습니다. 뇌성마비 환자들의 웅크림 보행 (crouch gait) 패턴은 출생 시 뇌손상으로 인해 근육을 적절하게 조절하기 어려워지기 때문에 발생합니다. 보다 구체적으로 웅크림 보행 동작은 약해진 '신근(extensor muscle)'과 경직적인 '굴근(flexor muscle)'에 원인이 있으며, 이중에서 특히 ‘넙치근(soleus muscle, 가자미근)’과 ‘비복근(gastrocnemius muscle, 장딴지근)’이 보행 주기에서 적절하지 않은 시기에 비효과적인 근육력을 발휘하기 때문입니다. 이러한 병리학적 원인에 기반하여 우리는 이 근육들을 특별히 강화하기 위해 골반에 하강력을 가하는 방식으로 로봇 제어를 설계했습니다.
다른 신체 움직임에 제약을 가하지 않고, 무게나 관성으로 인한 불필요한 힘을 없애기 위해 케이블 로봇을 활용했습니다. 제어하는 방법으로, 골반 움직임을 실시간으로 감지하기 위해 모션 캡처 시스템을 사용하여 형상 매트릭스를 통한 high level controller를 구성했으며, PID와 같은 low level controller를 사용하여 케이블의 장력을 제어했습니다. 이러한 high level 및 low level 제어 방식을 통해 케이블 로봇이 착용자의 보행 패턴에 맞춰 적절한 하중을 가하며, 원하는 다리 근육들이 강화되도록 도와주게 됩니다.
이러한 방식의 로봇 재활 훈련을 양측마비(diplegia)를 겪고 있는 6명의 뇌성마비 아동을 대상으로 6주간 실시하며, 아이들의 근육 강도와 근육의 협동 능력에 관해 데이터를 수집하고 운동 능력과 지면반발력(ground reaction force)을 지속적으로 관찰하였습니다. 그리고 훈련 종료 후 아이들의 보폭, 발목 동작의 범위, 앞꿈치와 뒷꿈치의 패턴 등 주요 보행 특징들이 현저히 개선된 것으로 나타났습니다. 놀라운 점은 우리의 로봇 재활 방식이 비정상적인 보행 패턴을 정상 패턴으로 교정시키는 방향으로 이루어지지 않았음에도 불구하고, 무릎 굴곡과 발목 굴곡 등 대부분의 보행의 운동학적 지표가 정상적인 보행 패턴과 유사한 방향으로 크게 개선되었다는 점입니다. 재활 전문의 역시 환자들에 대한 재활치료가 상당히 성공적이었음을 확인했습니다.
위 연구 결과는 환자를 치료하는 로봇을 개발하는 점에 있어 환자의 병리를 정확히 이해하고 이에 맞는 로봇과 제어를 설계하는 것이 얼마나 중요한 지에 대해 시사합니다. 앞서 언급한 바와 같이 뇌성마비 환자들의 기능적인 모빌리티는 자립 보행을 하는 것이 가능한 수준부터 휠체어에 전적으로 의지하며 몸통(torso)의 근력이 제대로 작용하지 않아 앉기가 어려워 팔을 쓰지 못하는 수준까지 다양합니다.
앞에서 보여준 로봇 재활 방식은 스스로 걸을 수는 있지만 (independent walker) 비정상 보행 패턴을 보이는 환자에게 적합한 방식이며, 자립 보행이 어려운 환자를 대상으로는 이 방식은 다소 부적합 할 수 있습니다. 다음 연구에서는 보행이 어려워 휠체어에 의존해야 하는 뇌성마비 아동들로 하여금 팔을 사용할 수 있도록, 그리고 의자에 앉아도 상체가 기울어지지 않도록 아동들의 코어를 훈련시키는 목적으로 필자가 개발한 Trunk Support Trainer (TRUST)를 소개합니다.
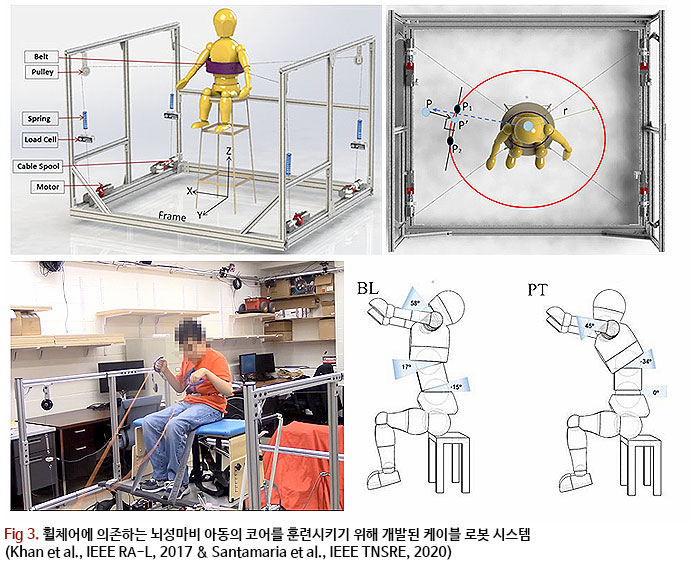
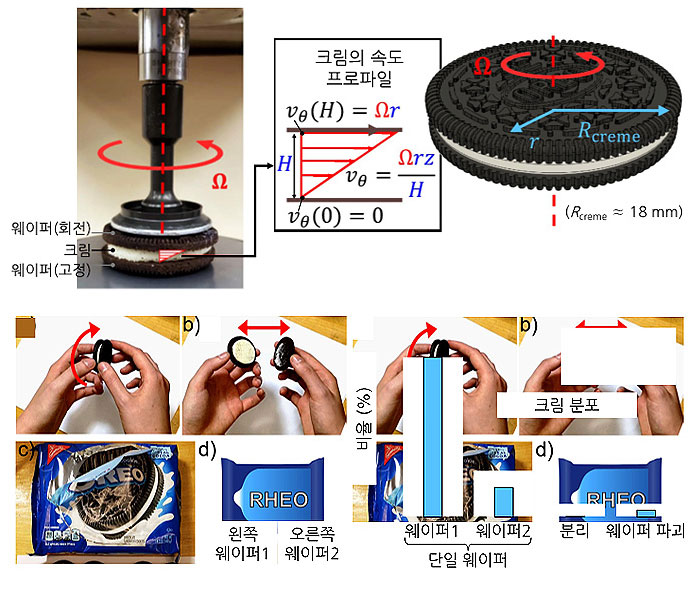
사람의 일상생활에서 상체를 제어하는 것은 매우 중요합니다. 상체를 제어할 수 있어야, 상체를 세워서 팔의 움직임으로 물건을 조작하는 것이 가능하기 떄문입니다. TRUST는 뇌성마비 아동들의 상체를 제어하는 훈련을 시키는 시스템으로, 아동의 팔의 유용성을 되찾아주는 것을 목표로 설계되었습니다. 사람의 상체를 구성하는 척추는 다양한 움직임을 구현해야 하기에 강체 로봇으론 이런 움직임을 제약없이 구현하기 어렵지만, 케이블 방식의 소프트 로봇은 복잡한 척추의 움직임을 제한하지 않으며 힘을 줄 수 있는 장점을 가지고 있습니다. 이 로봇 시스템은 4개의 케이블을 운용하여 뇌성마비 아동이 중심을 잡지 못하고 앞으로 넘어지는 위치에서 계산된 힘을 가함으로 상체가 넘어지지 않고, 꼿꼿이 세우고 팔을 활용할 수 있는 능력을 키워나가게 합니다.
Fig. 3의 우측 상단에 표기되어 있는 빨간 원은 이렇게 상체 안정성이 실패하는 위치(Stability Failure)를 나타내며, 이 위치에 아동의 상체가 가까워지게 되면 넘어지는 것을 방지하고자 로봇이 힘을 제공합니다. 사람이 잡아주는 대신에, Stability Failure 위치를 정량화하고 이를 제어하여 변화시켜가며 아이들이 코어 강화를 훈련시키고, 이를 통한 팔의 활용 능력을 향상시킬 수 있었습니다.
아동 재활연구에서 부모님들로부터 끊임없이 받는 질문들 중 하나는 이 로봇 재활의 효과를 어떻게 지속시킬 수 있는지에 대한 것입니다. 재활이란 일반 운동과 마찬가지로 그만 두면, 점점 신체의 기능이 떨어지게 됩니다. 이에 따라, 병원이나 실험실에서의 로봇 재활 훈련이 끝난 이후에도 집이나 그들의 일상에서 재활 훈련을 계속할 수 있게하는 수단을 제공하는 것은 로봇재활 연구자들이 로봇재활훈련을 디자인 할 떼 함께 고민해야 될 숙제입니다.
중증의 뇌성마비 아동의 경우에는 걷는 연습도 중요하지만, 빠르게 휠체어로 모빌리티를 제공해주는 것이 전체적인 아동 발달에 굉장히 중요합니다. 이는 아동의 모빌리티가 인지, 지각, 및 사회성을 기르는데 굉장히 중요한 역할을 하기 때문입니다. 이에 따라 이들에게 휠체어에 대한 흥미를 북돋우고 사회성을 높히는 수단으로서 Fig. 4와 같은 모바일 로봇을 이용한 훈련방법을 개발하였습니다.
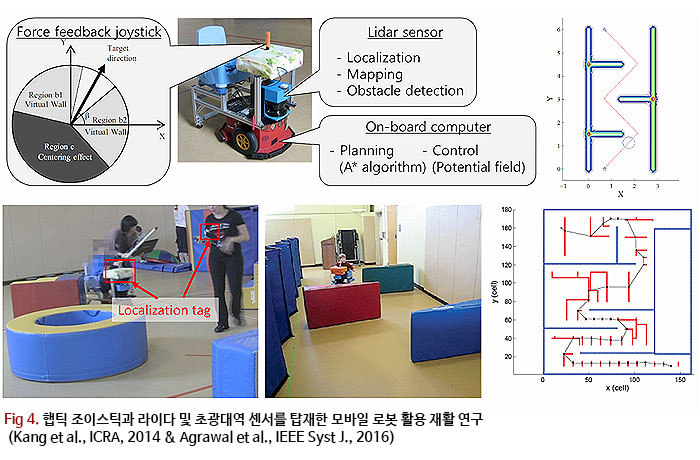
인텔리젠트 휠체어를 만들기 위해, 모바일 로봇은 force feedback 기반의 햅틱 조이스틱과 라이다 (Lidar) 센서와 초광대역 (ultra-wideband) 센서를 탑재한 형태로 개발되었습니다. 모바일 로봇 위에 설치된 라이다 센서와 초광대역 센서는 로봇과 장애물의 위치를 감지하고, 로봇은 장애물을 피할 경로를 찾고 최적의 제어를 제공하여 이 경로를 따라갈 수 있도록 햅틱 조이스틱을 통해 감각적인 피드백을 제공합니다. 그리고 다른 아동들의 위치를 초광대역 센서로 감지하고, 모바일 로봇의 주행이 다른 아동에게로 유도될 수 있도록 설계하였습니다.
이 실험의 주요 목적 중 하나는 보행할 수 없는 아이들의 사회화를 촉진하는 것입니다. 이러한 사회화의 첫번쨰 스텝으로써 뇌성마비 아동들을 같은 또래의 아이들이나 선생님 등 다른 사람들과 더욱 가까이 있을 수 있도록 유도하고 보상을 줌으로 그들의 사회성을 증진시키고자 하였습니다. 뇌성마비 아이들에 대한 모바일 로봇 실험에서 알게 된 또다른 놀라운 결과들 중 하나는 별다른 신체 재활 훈련없이 로봇을 조작하기만 하더라도 그들의 신체적 임상 점수가 향상될 수 있었다는 것입니다. 예를 들어, GMFM(Gross Motor Function Measure)은 앉기, 걷기, 뛰기 등과 관련된 점수인데 이 연구에서는 이러한 기동적인 모빌리티 관련 점수가 개선됨을 통해, 다리를 실제로 움직이지 않아도 운동 조절 능력을 향상시키는 가능성을 보여주었습니다. 이는 뇌성마비 아동들이 기동성을 계획하고 생각하는 방법을 습득하면서, 운동 조절 능력에 긍정적인 영향을 주었음을 나타냅니다.
본 결과를 통해 뇌성마비 환자의 재활에 있어 모바일 로봇의 활용이 가진 가능성을 확인할 수 있었으며, 이를 일상생활에서 일반 장난감 차를 개조해서 활용하는 등 다양한 아이디어들을 통하여 아이들의 삶의 질을 향상시키는 활로를 더욱 열고자 노력하고 있습니다.

지금까지 필자의 연구를 중심으로 자립 보행이 가능한 수준에서 휠체어가 필요한 수준까지 기능적인 모빌리티의 능력이 다양한 뇌성마비 환자들에 각각 다르게 적용되는 로봇 재활 기술들을 소개하였습니다. 특히 첫번째 연구를 통해 환자의 재활과 치료를 위해 무엇보다 필요한 것은 그들의 병리의 기저를 분석하고 치료 표적에 맞게 설계된 로봇 기술의 개발이라는 점을 확인할 수 있었습니다. 그리고 이 후 소개된 연구들을 통해서 환자의 모빌리티 수준에 따라 각각의 필요를 충족할 수 있도록 최적화된 로봇의 설계가 필요하다는 점과 그들의 일상생활에서 자발적으로 활용되며 재활의 효과를 증진시키고 이어갈 수단과 기술 개발의 필요성에 대해 살펴보았습니다.

|






(0).jpg)




.jpg)













