


박정호 (한국과학기술원 기계기술연구소)
우리는 건강을 유지하기 위해 다양한 운동을 합니다. 일상 생활에서는 뛰거나, 아령을 들거나, 스트레칭을 하는 등 맨몸으로 또는 소도구를 이용하여 동작을 반복하는 운동을 주로 수행합니다. 
하지만, 기계 기술을 활용하면 사람이 자력으로 따라하기 힘든 특수한 운동 방법을 구현할 수 있고, 대표적인 예시는 아래와 같습니다. 
위의 운동법들은 인체와 기계가 상호작용하는 방식을 달리하여 근육이 다른 방식으로 동작하도록 유도할 수 있어 엘리트 운동선수들의 훈련과 재활에 활용됩니다. 인체-기계 상호작용을 통해 인체가 운동을 수행하는 방식에 변화를 주면 개별 근육의 동작 방식 외에도 신체(근골격계)를 제어하는 방식 전반에 영향을 줄 수 있습니다. 반드시 위와 같은 물리적인 상호작용이 아니더라도, 기계공학의 센서 기술을 이용해 사람의 운동 상태를 측정하고, 그 결과를 적절히 변형하여 피드백을 제공하는 방식의 상호작용으로도 사람의 운동 제어 방식에 변화를 유발할 수 있습니다. 뇌졸중(뇌로의 혈액 공급이 줄거나, 뇌 안에서 혈액이 누출되어 일정한 영역의 뇌세포가 손상되는 질환), 다발성 경화증(신경세포 축삭돌기를 절연하는 수초가 손상되어 신경신호 전달에 장애가 생기는 질환) 등의 신경계 질환이 발병하면, 신경계 손상의 여파로 운동 중에 신체를 제어하는 방식이 변하고, 결과적으로 발병 전과 비교하여 운동 능력이 감소합니다. 일상 생활에 필요한 여러 운동을 하기 어려워지면 삶의 질에 막대한 부정적 영향을 미치기 때문에, 신경계 질환 후 운동 중 신체 제어 방식이 변화하는 양상을 이해하고 운동 능력을 효과적으로 재활하는 방법을 고안하는 것이 중요합니다. 이 때, 인체와 기계 사이의의 상호작용이 운동을 수행하는 방식에 영향을 주는 만큼, 다양한 인간-기계 상호작용 방식에 대하여 신경계 질환자가 어떻게 신체를 제어하여 운동을 수행하는지 탐구하여야 합니다. 기계와의 상호작용에 따른 운동 수행 방식에 대한 이해를 토대로, 신경계 질환으로 저하된 운동 능력을 효과적으로 증진할 수 있는 재활 전략과 훈련방법을 개발할 수 있을 것입니다. 
본격적인 연구 동향을 소개하기에 앞서, 인체의 운동 제어 방식을 설명하는 한 요소인 ‘근육 간 협응(intermuscular coordination)’의 개념과 더불어, 관련한 연구 동향을 먼저 소개하겠습니다. 근육 간 협응은 인체의 수 많은 근육들의 활성이 어떻게 조절되어 운동을 수행하는지를 일컫는 개념입니다. 기계공학자들에게 친숙한 로봇 시스템은 대개 목표 작업을 수행하는 데 필요한 최소한의 기구학적 자유도(관절)과 구동기를 가지고 있습니다 (Fig 1). 예를 들어 로봇형 매니퓰레이터(manipulator)는 말단에 부착된 작업 도구의 3차원 위치와 3차원 방향을 결정하기 위해 6개의 관절과 6개의 구동기를 지닌 구조로 제작됩니다. 하지만 인체는 로봇 시스템에 비하여 높은 자유도의 관절 구조를 가지며, 많은 수의 근육을 동시에 사용하여 운동을 수행하는 여유 자유도 시스템(redundant system)입니다. 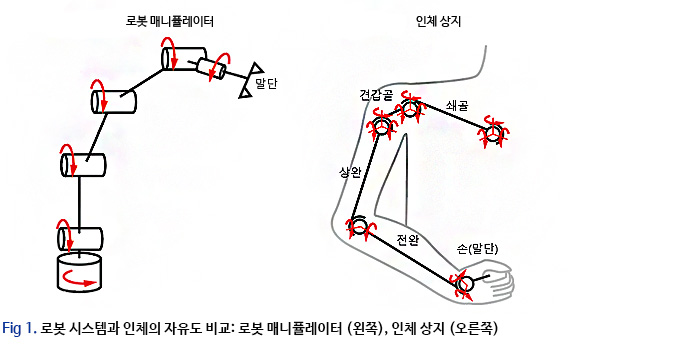
여분의 기구학적 자유도와 구동기(근육)를 가진 인체를 로봇과 같이 제어한다면, 목표한 궤적으로 움직이기 위하여 수 많은 근육을 사용할 타이밍과 근육 별로 발생할 힘 세기를 도출하는 것은 매우 복잡한 문제일 것입니다. 인체가 모든 근육에 대하여 일일이 사용 패턴을 결정한다면, 인체는 일상생활 중 다양한 운동을 계획하고 실행하기 위하여 과도한 인지 능력을 소모할 것입니다. 하지만, 우리는 일상에서 시야 밖으로 팔을 뻗어 물건을 잡아 조작하거나, 다른 생각을 하면서 다리를 움직여 걷는 등 무의식적으로 다양한 운동을 수행합니다. 인체가 운동 제어의 복잡도를 낮추기 위하여 개별 근육을 제어하는 것이 아니라, 여러 근육을 일정한 방식으로 조합한, 적은 수의 운동 모듈(motor module)의 사용 패턴을 제어하여 운동을 수행한다는 ‘근육 시너지(muscle synergy)’ 가설이 제시되었습니다 [1], [2]. 즉, 수행하려는 운동에 따라 사용할 운동 모듈을 선택하고, 각 운동 모듈의 사용 패턴을 결정하여 운동 수행에 필요한 다양한 근육 활성의 패턴을 생성한다는 점이 근육 시너지 가설의 핵심 아이디어입니다. (Fig 2). 근육 시너지 개념에 기반한 근육 간 협응 연구에서는 대상자가 운동을 수행하는 방식을 설명하기 위하여 어떤 근육들이 하나의 운동 모듈로 묶여 있고, 각 운동 모듈을 언제, 얼만큼 사용하는지를 분석합니다. 수학적으로 근육 시너지는 동시에 여러 근육으로부터 수집된 다채널(multi-channel) 근전도 데이터에 주성분분석(PCA), 독립성분분석(ICA), 음수미포함행렬분해(NNMF) 등 다양한 차원축소(dimensionality reduction) 알고리즘을 적용하여 분석합니다. 어떤 차원축소 알고리즘을 사용하는 지와 관계없이 유사한 근육 시너지 분석 결과를 얻을 수 있다고 알려져 있습니다 [3]. 최근 일부 연구자들은 시너지 분석 결과의 타당성을 높이기 위해 기존의 차원축소 알고리즘을 개량한 새로운 알고리즘을 제시하고 있습니다 [4], [5]. 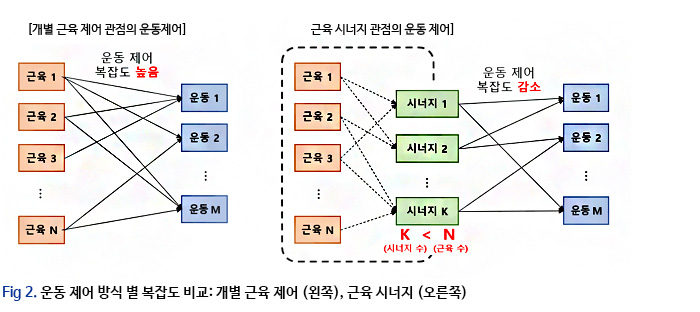
근육 시너지 개념이 제시된 초기에는 개구리, 유인원 등 동물 모델의 신경계를 직접적으로 자극하고 근육이 활성되는 패턴을 관찰하여, 근육 시너지의 존재를 현상적으로 관찰하였습니다. 예를 들어, 개구리의 다리 피부를 자극하며 9개 다리 근육의 근전도를 관찰했을 때, 4개의 근육 조합이 나타났습니다 [2]. 원숭이(rhesus macaques) 대뇌 피질의 손 관련 운동 영역을 직접 자극하며 나타난 19개 손 근육의 다양한 활성 패턴은 개체에 따라 8~10개의 근육 조합으로 설명할 수 있다는 사실이 보고되었습니다 [6]. 최근에는 인간을 대상으로 경두개자기자극술(transcranial magnetic simulation, TMS)과 같은 침습적이지 않은 뇌 자극 방법을 이용하여 대뇌 운동 영역을 자극하고 발생되는 손 관련 근육들의 활성 패턴을 측정한 연구도 보고되었습니다 [7]. 근육 시너지 개념에 따라 근육들이 조합되어 활성 된다고 가정하였을 때, 관찰된 여러 손 근육의 활성 패턴을 정확히 설명할 수 있었습니다. 근육 시너지의 현상적 관찰을 넘어, 인체의 운동 제어 과정에서 근육 시너지가 형성되는 두 가지의 신경해부학적 기전이 제시되었습니다 [8]. 첫번째 방식은 뇌가 생성한 운동 명령이 사이신경세포(interneuron)의 신경망 구조에 따라 여러 근육으로 동시에 전파된다는 “해부학적 시너지”입니다. 사이신경세포들에 의해 같은 운동 명령을 전달받는 근육들이 하나의 근육 시너지를 구성하게 됩니다. 여러 운동 명령이 대뇌로부터 근육들로 전파되면, 각 근육에서는 여러 운동 명령을 종합하여 수축을 하게 됩니다. 발달이 완료된 성인의 신경계에서는 신경세포들의 해부학적 연결 관계가 변하지 않기 때문에, 해부학적 기전에 의해 생성된 근육 시너지는 쉽게 변하지 않을 것이라고 간주합니다. 두번째 방식은 신경계의 해부학적 구조와 관계없이 여러 근육들의 활성이 함께 발생되는 “기능적 시너지”입니다. 예를 들어, 대뇌 피질 운동 영역의 각 부분은 특정 근육과 연결되어 있어, 특정 영역이 활성 되면 그 영역에 연결된 근육이 수축합니다. 여러 근육과 연결된 대뇌 피질 운동 영역이 서로 겹치기 때문에 특정 운동 영역이 활성 되면 여러 근육이 동시에 수축되어 근육 시너지를 형성할 수 있습니다. 장기간의 훈련을 통해서 대뇌 피질의 영역 별 기능이 변화하는데, 이를 ‘신경 가소성’이라고 합니다. 신경 가소성에 의해 대뇌 피질 운동 영역과 각 근육의 연결 관계가 변할 수 있기 때문에, 기능적 시너지는 해부학적 시너지에 의해 훈련 등 외부 요인에 대해 가변적일 것으로 추정하고 있습니다. 
대표적인 신경학적 질환인 뇌졸중의 경우, 2000년대 후반부터 뇌졸중으로 인한 편마비(hemiparesis, 뇌졸중이 발생한 뇌 반구가 운동을 관장하는 한 쪽의 신체에 발생하는 운동 기능 감소)를 겪는 환자들을 대상으로 다양한 운동 중의 근육 시너지를 평가한 결과들이 다수 보고되었는데, 상지(팔과 손)의 운동 제어에 관한 연구들을 중심으로 대표적인 연구 사례를 소개하겠습니다. 뇌졸중 환자의 근육 시너지에 관한 초기 연구로 Cheung 등이 2009년과 2012년에 걸쳐 수행한 일련의 연구([9], [10])를 꼽습니다. 뇌졸중 발병 후 2~18개월이 경과한 8명의 뇌졸중 환자와 6명의 비장애인이 양쪽 팔을 이용해 7가지 팔 동작을 수행할 때, 어깨, 팔꿈치 및 등에 분포한 총 12~16개 근육의 근전도를 측정하여 근육 시너지를 분석하였습니다 [9]. 뇌졸중 환자의 편마비가 발생한 환측 팔과 편마비 증상이 없는 건측 팔 간의 근육 시너지 구조(근육들이 조합된 방식)이 유사하고, 뇌졸중 환자와 비장애인 간에도 근육 시너지가 유사하였습니다. 시너지 구조가 유사한 대신, 각 시너지가 상지 동작 중에 사용되는 패턴이 다르다는 점이 보고되었습니다. 보다 많은 수의 뇌졸중 환자를 모집한 후속 연구([10])에서는 환측과 건측 상지의 근육 시너지를 비교하여 건측의 근육 시너지로 환측의 근육 시너지를 설명할 수 있는 2가지 모델을 제시하였습니다. 첫번째 모델은 환측의 근육 시너지가 건측의 근육 시너지의 선형 조합으로 표현될 수 있다는 ‘병합(merging)’ 모델이며, 다른 모델은 병합 모델과 반대로 한 건측 시너지가 쪼개져 여러 환측 시너지를 이루는 ‘분열(fractionation)’ 모델입니다 (Fig 3). 이 모델들은 아래에서 소개할 여러 후속 연구에서 뇌졸중 환자의 근육 시너지 변화를 설명하는데 보편적으로 적용되었습니다. 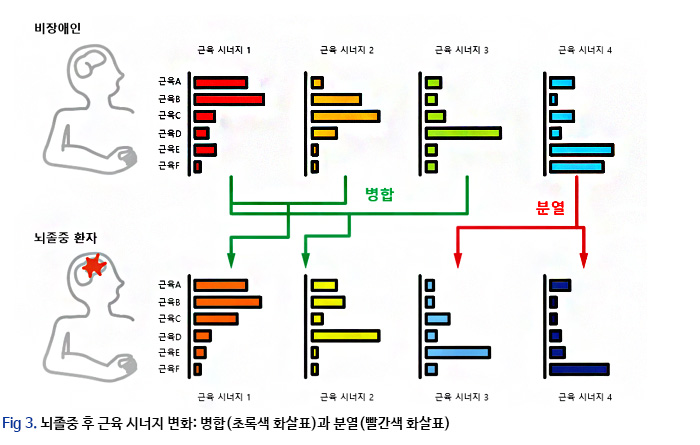
2013년 이상욱 등은 뇌졸중 환자와 비장애인을 대상으로 손과 손목 근육의 근육 시너지를 비교하였습니다 [11]. 실험 참가자들은 실험자가 제시하는 여러 손 자세를 최대한 따라하되, 실험자들은 참가자들이 본인의 손 운동 능력에 따라 편한 자세를 골라 취하도록 허용하였습니다. 뇌졸중 환자들의 손/손목 근육의 활성은 비장애인과 비교하여 보다 적은 수의 근육 시너지로 설명할 수 있었습니다. 이는 뇌졸중 환자는 여러 손 자세를 취하는 동안 손과 손목 근육을 보다 단순한 조합으로 사용하였다는 걸 의미합니다. 뇌졸중 환자의 손 운동 기능이 떨어질수록, 근육 시너지의 수가 4개에서 2개까지 큰 폭에서 감소하였습니다 (Fig 4). 근육의 수는 동일하지만, 근육을 조합하는 방식의 수가 더 적은 만큼, 하나의 조합(근육 시너지)에는 더 많은 수의 근육이 묶이게 되었습니다. Cheung 등([10])이 제시한 병합 모델을 이용하여 비장애인의 시너지를 조합해 뇌졸중 환자의 근육 시너지를 설명할 수 있었습니다. 근육 시너지 수가 감소하는 만큼, (다른 기능을 하는) 여러 근육들이 하나의 시너지로 묶이고 근육 활성의 복잡도가 감소하기 때문에 손의 운동 기능이 감소할 수 있다는 점을 시사합니다. 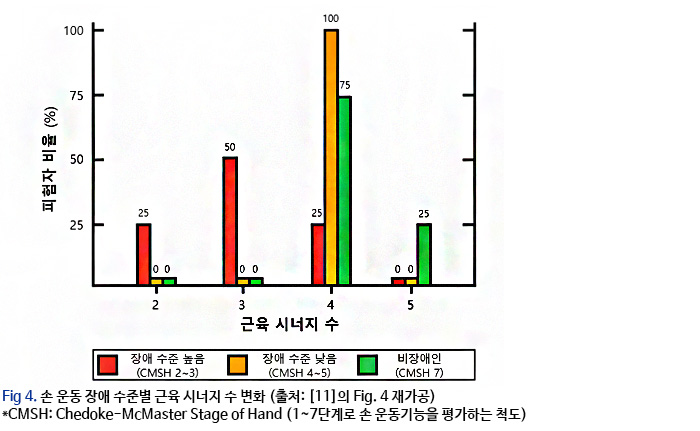
2014년 Garcia-Cossio 등은 뇌졸중 환자와 비장애인이 상지 동작을 하는 동안, 어깨와 팔꿈치 근육들의 활성 패턴을 설명하는 근육 시너지를 분석하였습니다 [12]. 뇌졸중 환자는 비장애인에 비하여 적은 수의 근육 시너지를 활용하였고, 상지 관절의 경직도(spasticity) 등급의 합산으로 측정한 상지 운동 장애 수준이 높을수록 뇌졸중 환자들은 더 적은 수의 근육 시너지를 사용하는 것으로 나타났습니다 (Fig 5). 앞서 소개한 이상욱 등([11])의 연구와 유사하게, 이 연구에서도 뇌졸중 환자의 근육 시너지 수는 5개에서 1개까지 큰 폭에서 감소하여, 운동 기능 장애 수준에 따라 근육 사용 패턴의 복잡도가 큰 차이를 보인다는 것을 드러냈습니다. 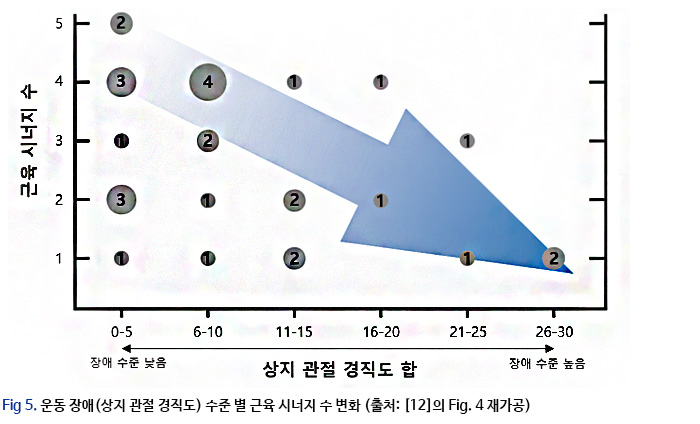
2010년 Clark 등의 보행 중 하지(다리) 근육 시너지에 관한 연구에서도 앞서 소개한 상지 근육 시너지 연구와 유사한 결과가 보고되었습니다 [13]. 비장애인과 뇌졸중 환자를 모집하여 각 참가자가 원하는 속도에 맞춰 보행하도록 한 뒤, 다리 근육의 근육 시너지를 비교하였습니다. 비장애인 참가자들은 보행 중 평균 4개의 근육 시너지를 사용했지만, 뇌졸중 환자들은 2개에서 4개까지 근육 시너지 수의 편차를 보였습니다 (Fig 6). 2개의 근육 시너지를 사용하는 뇌졸중 환자는 더 많은 근육 시너지를 사용하는 뇌졸중 환자와 비장애인에 비하여 느리게 걸어 보행 능력이 낮은 것으로 나타났습니다. 보행 속도 외에도, 근육 시너지의 수는 양측 다리의 추진력 및 보폭의 비대칭성과도 상관 관계를 보여, 하지 근육의 근육 간 협응이 보행 능력 전반과 연관되어 있음을 시사합니다. 뇌졸중 환자의 근육 시너지는 Cheung 등([10])이 제시한 병합 모델에 따라 비장애인의 근육 시너지의 선형 조합으로 표현될 수 있었습니다. 흥미롭게도, 모든 뇌졸중 환자의 근육 시너지 수를 동일하게 4개로 분석하였을 때, 나타나는 시너지 구조는 유사한 대신 각 시너지의 활성 패턴이 달라졌는데, 이는 뇌졸중 후 하지 근육 시너지 구조는 보존되지만 각 시너지를 독립적으로 사용하지 못해 근육 간 협응이 단순해질 수 있다는 가능성을 제시하였습니다. 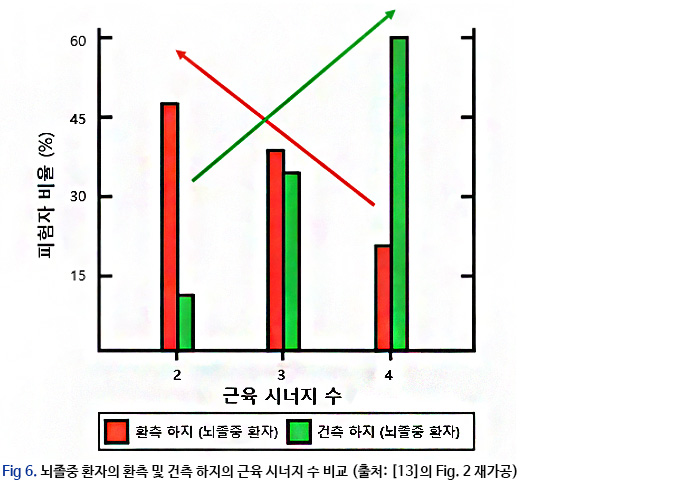
비교적 최근에 발표된 상지 근육 시너지에 관한 연구들은 재활 훈련에 사용될 수 있는 로봇형 운동 장비를 이용한 상황에서 뇌졸중 환자의 근육 시너지를 평가하였습니다. 각 운동 장비는 구현하는 재활 운동의 형태에 따라 움직임을 보조하거나 (보조력 제공), 특정 방향으로의 움직임을 제한하는 등 다양한 인간-기계 상호작용을 제공하기 때문에, 상호작용의 형태에 따라 뇌졸중으로 인한 근육 시너지 변화가 다르게 나타나는지 비교하는 것도 흥미로울 것입니다. (단, 각 연구에서 모집한 피험자의 임상적 특성, 근육 시너지를 측정한 동작 등 실험 설계가 달라 주의하여 비교하여야 합니다.) 2015년 노진숙 등은 상지 자세를 고정한 (등척성 운동) 상황에서 3차원의 말단 힘을 조절하는 운동 과제를 수행하는데 사용되는 어깨와 팔꿈치를 움직이는 총 8개 근육의 시너지를 분석하였습니다 [14]. 등척성 상지 운동을 구현하기 위하여 8방향의 케이블로 상지 말단과 맞닿는 손잡이의 위치를 고정하는 운동 장치가 사용되었습니다 (Fig 7). 24명의 뇌졸중 환자를 모집하여 푸글-마이어 평가법으로 매긴 상지의 운동 장애 수준에 따라 세 그룹(중증, 중등증, 경증)으로 구분하였습니다. 대조군으로 8명의 비장애인 참가자를 모집하여 근육 시너지를 비교하였습니다. 4개의 그룹은 모두 4개의 근육 시너지를 사용하였습니다. 저자(노진숙 등)은 운동 장애가 심할수록 어깨를 바깥으로 드는 여러 방향의 삼각근들이 함께 사용되는 경향이 높았음에 대하여 주목하여 재활 전략으로 제시하였습니다. 그 외의 전반적인 근육 시너지 구조는 시너지 수가 동일한 만큼 유사하게 나타났습니다. 2022년 발표된 후속 연구에서 삼각근이 동시에 사용되는 비정상적 패턴이 강할수록 3차원의 말단 힘을 제어하는 능력 역시 감소함을 보고하였습니다 [15]. 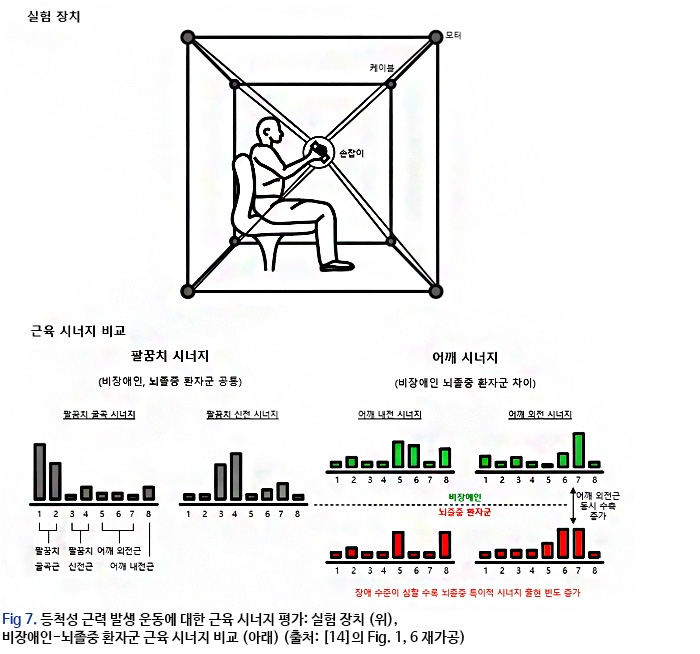
2021년 박정호 등은 상지 말단을 직선 궤적을 따라 일정한 속도로 움직이는 등속성 운동에 대하여 뇌졸중 환자 16명와 비장애인 8명의 어깨와 팔꿈치의 13개 근육의 시너지를 비교하였습니다 [16]. 3차원 공간에서 직선 상의 등속성 상지 운동을 구현하기 위하여, 선형 구동기를 이용한 근육 시너지 측정 장비를 개발하였습니다 [17] (Fig 8). 비장애인은 팔꿈치 2개, 어깨 3개, 총 5개의 시너지를 사용하였으나, 뇌졸중 환자는 비장애인보다 한 개 적은 총 4개의 시너지(팔꿈치 2개, 어깨 2개)를 사용하였습니다. 대부분의 뇌졸중 환자들은 4개 혹은 5개의 근육 시너지를 사용하였는데, 앞서 살펴본 이상욱 등([11])과 Gracia-Cossio 등([12])의 연구에서 나타난 것처럼 뇌졸중 환자군 내에서 시너지 수의 변화가 크지 않았습니다. 운동 장애 수준에 따른 시너지 수의 변화(감소)도 관찰되지 않았습니다. 노진숙 등([14])의 연구와 유사하게, 뇌졸중 환자는 어깨 삼각근을 뭉뚱그려 사용하기 때문에 어깨 근육 시너지 수가 1만큼 감소한 것으로 나타났습니다. 뇌졸중 환자와 비장애인의 근육 시너지 수를 모두 5개로 맞추었을 때, 뇌졸중 환자와 비장애인의 근육 시너지 구조가 유사하게 나타났으며, 시너지의 활성 패턴의 차이가 운동 능력의 차이에 기여하는 하나의 원인이라는 점을 보였습니다. 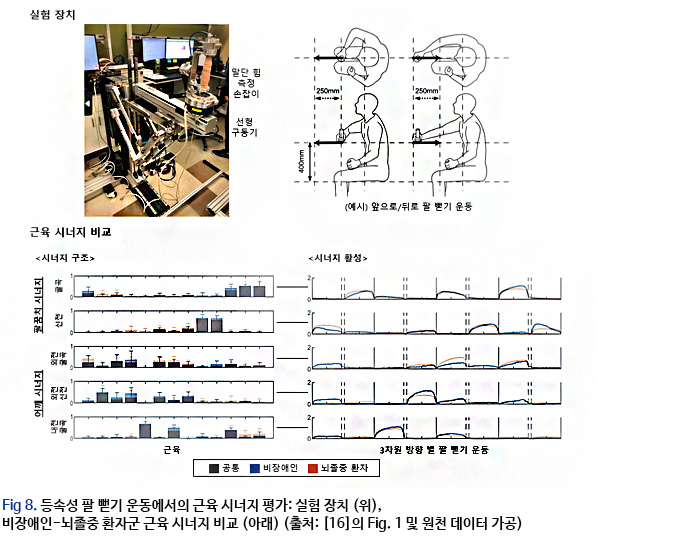
뇌졸중 외의 다른 신경계 질환에 대한 연구 결과도 있습니다. 2018년 Pellegrino 등은 11명의 다발성 경화증 환자와 11명의 비장애인을 대상으로 2차원 평면 내에서 움직이는 말단형 로봇 운동 장치를 이용해 구현한 4종류의 운동 (자유 운동, 보조력 제공 운동, 저항력 제공 운동 및 등척성 운동)을 수행하는데 사용되는 상지 근육 시너지를 비교하였습니다 [18]. 다발성 경화증 환자들은 비장애인과 전반적인 시너지 구조가 유사하였으나, 운동 종류 별로 사용하는 근육 시너지는 비장애인의 경우에 비해 큰 차이를 보였습니다. 시너지 구조보다는 시너지 활성을 비교했을 때 다발성 경화증 환자들은 비장애인과 큰 차이를 보였습니다. 다발성 경화증 환자들이 비장애인에 비하여 운동 방법(및 인간-기계 상호작용)에 따라 근육을 동원하여 운동을 수행하는 방식이 크게 변함을 시사합니다. 저자(Pellegrino 등)은 상지 근육 시너지를 다발성 경화증 환자들의 운동 제어 능력을 평가하고 훈련하는 지표로 사용할 수 있다고 제안하였습니다. 2012년 Zariffa 등은 척수 손상 환자 6명과 비장애인 10명을 대상으로 다양한 물건을 집을 때 사용되는 8개 손 근육의 근육 시너지를 평가하여 비교하였습니다 [19]. 비장애인과 척수 손상 환자군은 다른 시너지를 나타냈지만, 비장애인과 비교하여 척수 손상 환자군에서 나타나는 시너지의 변화 정도는 환자들의 장애 수준과 연관되지 않았기에, 재활 전략 등을 제안하는 데까지 이르지 못하였습니다. 본 연구동향 분석에서는 뇌졸중을 포함한 신경계 질환 후의 인체 운동 제어를 이해하기 위한 근육 시너지(근육 간 협응) 연구 사례와 일부 연구에 활용된 기계 기술을 살펴보았습니다. 뇌졸중 환자 및 다발성 경화증 환자군에서는 기계와의 상호작용이 없는 자유로운 공간에서 운동을 하는 경우와 기계와의 상호작용 하에서 운동을 수행하는 경우, 질환에 의하여 근육 시너지가 변화하는 경향이 다르게 나타났습니다. 신경계 질환 환자에게 부족한 힘을 보조하거나, 특정한 방향으로의 움직임이 제한하는 등 인간과 기계 사이의 다양한 상호작용은 인체가 운동을 수행하는 방식에 영향을 미치며, 그에 따라 여러 근육의 활성을 조절하는 방식에도 차이를 만들어내는 것이라 추정됩니다. 다양한 종류의 운동에 대한 신경계 질환 환자군의 근육 시너지 평가 결과를 바탕으로, 질환 별로 특이적으로 나타나는 근육 간 협응 패턴과 비정상적 근육 간 협응 패턴의 운동 능력에 대한 영향을 이해하고, 그에 대한 재활 훈련 전략을 제시할 수 있을 것입니다. 다양한 형태의 상호작용을 제공하는 운동 기계들을 이용해 엘리트 운동 선수들이 특정한 목적의 훈련을 진행하듯이 기계 기술은 뇌졸중 환자의 특정한 비정상적 근육 간 협응 패턴에 대한 훈련을 구현하는데 활용될 수 있습니다. 제안된 재활 훈련 전략을 토대로 기존의 재활 훈련을 보완하는 새로운 운동 방법을 개발하여, 뇌졸중 환자군의 삶의 질을 개선하는데 기여할 수 있을 것입니다.
|
- *CMSH: Chedoke-McMaster Stage of Hand
- multi-channel
- redundant system
- motor module
- manipulator



전체댓글 0
(0).jpg)




.jpg)













