


김채형 (한국항공우주연구원 한국형발사체개발사업본부)
|
휴머노이드(humanoid)는 ‘human(인간)’ 단어와 ‘oid(~닮음 것)’의 합성어로 인간은 인간을 닮은 모든 것을 의미한다[1]. 휴머노이드라는 용어는 1870년대 유럽의 식민지 지역 원주민에 대해 최초로 사용되었으며 20세기에는 형태학적으로 인간의 골격과 닮은 것들 것 의미하고 있다. 인간과 닮은 로봇은 휴머노이드 로봇(또는 안드로이드)이라고 하며 2000년 일본 혼다 기업에서 만든 ASIMO가 최초로 인간과 같이 두 발로 움직이고 두 팔을 움직이는 모습을 보였다. 우리나라의 한국과학기술원(KAIST)에서도 2004년 Hubo를 만들어 선보인 바가 있다. 휴머노이드 로봇은 공상과학 소설이나 영화에서 자주 선보이는 주제이다. 영화 스타워즈의 C3PO가 가장 유명한 휴머노이드 로봇이며 2001년 영화 A.I(Artificial Intelligence)는 사람과 똑같이 생긴 휴머노이드 로봇를 보여준 바가 있다. 최근 영화에 나오는 휴머노이드 로봇은 기계적인 로봇보다는 오히려 바이오적인 느낌이 강하고 터미네이터 같은 휴머노이드 로봇은 인류와 대적하는 느낌이지만 그래도 인간의 형태를 한 휴머노이드 로봇은 우리의 호기심을 여전히 자극하는 주제이다. 최근의 휴머노이드 로봇 기술은 영화에서 봤던 것과 같이 행동할 수 있을 만큼 발달하고 있다. 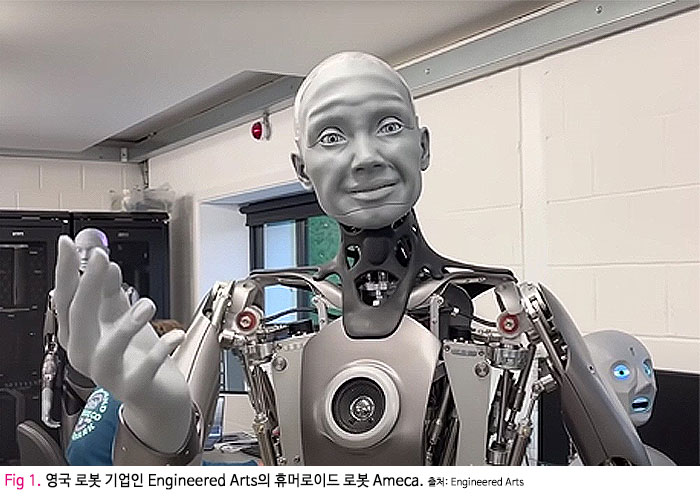
유튜브 채널에서 화재가 된 바가 있는 영국 로봇 기업인 Engineered Arts의 휴머로이드 로봇 Ameca는 인간처럼 놀라는 표정, 눈을 깜박이면서 자신의 손을 들어 보는 등 다양한 표현과 동작을 보였으며 인간과 매우 흡사하여 오히려 거부감이 들기도 한 바가 있다[2]. 휴머노이드 로봇이 아닌 일반 로봇은 이미 산업계에서는 조립이나 제조에 오래전부터 사용되고 있고, 스타워즈의 R2D2를 닮은 서빙 로봇들이 우리 일상 생활에 매우 밀접하게 사용되고 있다. 그러면 일반 로봇이 아닌 휴머노이드 로봇은 왜 필요할까? 휴머노이드 로봇 무용론자들은 ‘동물의 형태나 특정 형상을 한 로봇이 구현하기 쉽고 실제로도 잘 작동하는데 굳이 인간 형상을 한 불안정한 로봇이 필요한가?’라는 의문을 제기한다. 휴머로이드 로봇이 필요한 이유는 무엇일까? 로봇은 위험하거나 위험할 수 있는 공간에서 인간을 대신해야 한다. 이런 공간은 안간의 행동 반경과 행동 형태를 반영해야 하는데 인간과 같은 휴머로이드 로봇이 적합하다. 한 예로 후쿠시마 지진으로 방사능이 노출된 원전시설에 들어가 각종 잠금 장치를 열고 밸브를 작동하거나 수리 작업을 해야 한다면 과연 어떤 로봇이 적합할 것인가? 인간의 행동을 똑같이 재현할 수 있는 휴머로이드 로봇이 적합할 것이다. 이와 같은 이유로 우주 개발 분야에서도 휴머로이드 로봇은 많은 연구가 진행되고 있다. 국제 우주 정거장 같은 경우 노후화와 우주 쓰레기로부터 파손이 되고 있기에 국제 우주 정거장 외부로 나가 수리를 해야 한다. 우주 방사능과 우주 쓰레기 파편 위험 속에서 인간 우주인이 국제 우주 정거장 외부로 나가 수리 작업을 하는 것은 매우 위험한 작업이다. 또한 달이나 타행성 탐사시 최종적으로 인간이 거주하는 것을 생각하고 탐사가 진행이 된다. 휴머로이드 로봇이 우주선을 타고 행성에 착륙하여 탐사를 하거나 거주 시설을 미리 건축하는 등의 작업은 인간을 대신하여 휴머로이드 로봇이 선행적인 연구를 가능하게 해준다 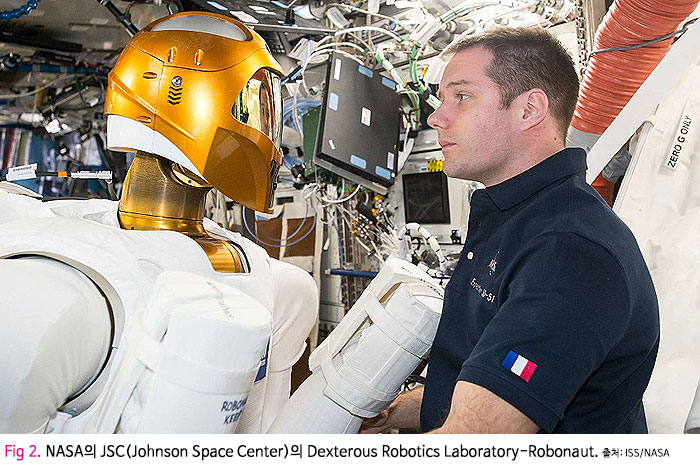
우주에서 사용을 목적으로 NASA의 JSC(Johnson Space Center)의 Dexterous Robotics Laboratory은 Robonaut의 개발을 시작하였다[3]. Robonaut 1(R1)은 궤도 비행을 하는 소행성과 같은 행성에 착륙하여 무인으로 탐사하거나 우주정거장에서 인간을 대신하여 작업을 하는 목적으로 개발이 되었으며 2002년 R1B로 최초로 소개되었다. R1은 몇 개의 낮은 하체를 가지는데 Zero-G leg은 우주정거장의 외부 선체 작업 시 외부 사다리나 지지대를 잡고 이동할 수 있도록 WIF 소켓을 사용하도록 되어 있다. 2003년에 개발된 RMP(Robotic Mobility Platform)을 사용하여 이동 가능한 형태이다. RMP은 2개의 바퀴로 구성되어 있으며 개인 이동 장치인 세그웨이와 비슷하게 생겼다. 2006년에 개발된 4개의 바퀴가 달린 Centaur 1은 사막에서 시험이 진행되었으며 이는 현재 화성 탐사선과 같이 행성이나 소행성 표면을 탐사하기 위한 목적이다. R1의 개량형인 Robonaut 2(R2)은 2010년에 소개되었다[1]. R2는 R1에 비해 소형화되었고 처리 속도나 동작도 R1에 비해 4배나 빠르며 보다 많은 센서가 장착되어 있다. 우주정거장 내에서 승무원이 조종 가능할 뿐만 아니라 지구 지상국에서도 원격으로 제어가 가능하다. 원격 제어는 Telepresence기술을 사용하는데 이는 가상 현실용 헬멧과 장갑을 사용하여 사용자가 가상 세계에서 R2를 통해 간접적으로 조종하고 느끼는게 가능한 기술이다. 원격 수술이나 위험 지역에서 로봇을 사용한 작업에 사용되기도 하는 기술이며 우리가 드론을 핸드폰에 연결하여 3D 헬멧을 쓰고 조종하는 것과 유사하다. R2의 12 자유도를 가지는 손과 2자유도를 가지는 손목은 보다 유연한 작업이 가능하며 손가락에는 감지 센서도 장착되어 있다. 
이를 통해 원격 조종을 하는 조정자는 R2를 통해 다양한 감각을 얻을 수 있으며 보다 자유로운 작업이 가능하다. R2는 스페이스 셔틀인 디스커버리호에 실려 2011년 2월 국제우주정거장에 도착하였다. 이는 R2를 국제우주정거장까지 운반한 디스커버리호의 39번째 임무이자 마지막 임무였다. 국제우주정거장에 도착한 R2는 세계에서 최초로 지구 밖에서 에너지를 공급받아 가동된 최초의 휴머로이드 로봇으로 기록되었다. R2는 국제우주정거장에서 미세 중력에서의 움직임, 소프트웨어 업그레이드, 낮은 하체 부분의 장탈착 등 우주정거장의 내부 환경에서 적응 훈련을 대부분 수행하였다. R2는 본래 지구로 귀환할 예정이 없었다. 대부분의 수리도 국제우주정거장에서 이루어질 예정이었지만 2018년 5월 스페이스 X의 CRS-14 Dragon 화물선을 타고 지구로 귀환하여 우주에서 발생했던 치명적인 오류를 수정하였다[4]. NASA는 Robonaut를 아르테미스 프로그램에서 달 궤도의 소형 우주정거장인 Gateway에도 보낼 예정이다. Gateway는 우주인이 잠시 들러서 달 탐사를 수행하기 때문에 국제우주정거장처럼 인간이 장시간 보내지 않는다. 하지만 각종 임무, 유지 보수나 인간 우주인의 조력자가 필요하기 때문에 Robonaut의 사용을 고려하고 있으며 국제우주정거장 귀환후에는 NASA의 큐브형 로봇인 Astrobee와 연계하여 작업하는 것을 테스트 중이다. 
Robonaut의 가장 마지막 모델은 R5로 Valkyrie이다[5]. Valkyrie는 미국 DARPA의 2013년 DRC(DARPA Robotics Challenge) 경기에 출전하기 위해 제작되었으며 대회 이후 내구성과 안정성 등을 개선하여 화성 탐사 등의 목적에 사용될 예정이다. Valkyrie의 머리는 레이저 및 가시광선과 적외선 스테레오 방식의 지각 센서가 탑재되어 있다. 몸통 앞뒤에는 위험 감지 카메라가 장착되어 있다. 팔은 4개의 탄성 로터리 액츄에이터와 7개의 조인트로 연결되어 있다. 손은 3개의 손과 엄지로 되어있으며, 손목은 단일 로터리 액츄에이터로 롤운동이 가능하며, 한 쌍의 선형 액츄에이터를 통해 손목의 피치, 요 운동이 가능하다. 다리는 5개의 탄성 로터리 액츄에이터로 구성되어 있고 발목은 2개의 탄성 선형 액츄에이터로 작동된다. Valkyrie의 키는 약 1.9 m, 무게는 약 125 kg, 컴퓨터는 2대의 인텔 core i7이 탑재되어 있으며 44개의 자유도를 가진다. 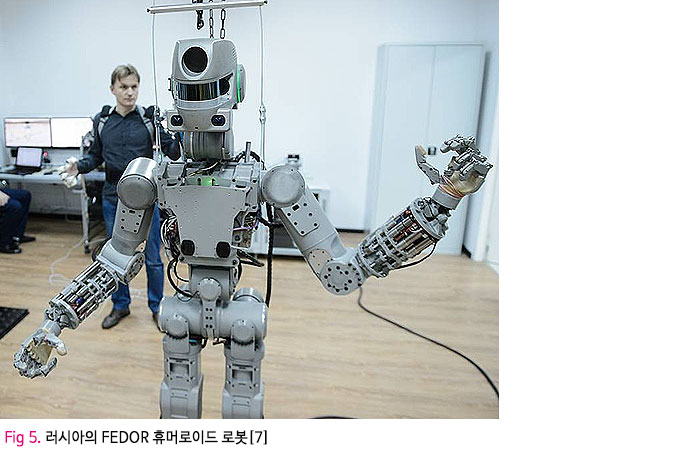
미국에 이어 국제우주정거장에 휴머로이드 로봇을 보낸 나라는 러시아이다. 러시아 휴머로이드 로봇 이름은 FEDOR이다. FEDOR는 Final Experimental Object Research의 약자이며 격투기 선수 효도르처럼 러시아의 남성 이름인 Fyodor와 유사하다[6]. FEDOR가 2017년에 처음으로 모습을 보였을 때는 양 손에 권총을 들고 사격을 하는 모습이어서 군사용 목적의 “Terminator’가 아니냐는 의심을 받았었다. 개발자들은 FEDOR의 손 작동의 민감성과 유연성 테스트를 위한 것이라고 밝히는 에피소드가 있었다. FEDOR의 키는 180 cm, 무게는 160 kg으로 인간형 로봇으로는 무거운 편이다. 2019년 8월에 Soyuz MS-14에 실려 국제우주정거장으로 보내졌다. 국제우주정거장으로 보내진 FEDOR의 모델명은 Skybo F-850이다. FEDOR는 국제우주정거장 모듈 Zvezda에 도킹되어 전원에 연결되어 국제우주정거장 외벽을 걸어 다니면서 케이블을 수리하는 시뮬레이션을 수행하였다. FEDOR는 R2처럼 원격으로 사람의 동작을 미러링한 구동이 가능하며 인공지능으로 자율 동작이 가능하다. 2019년 9월에 MS-14를 통해 무인으로 지구에 귀환하였다. 이와 같은 FEDOR의 우주정거장에서의 작동 데이터를 토대로 2019년 12월 러시아의 Android Technology Company와 일본의 GITAI 창업기업은 공동연구를 통해 달 탐사가 가능한 로봇을 만들 계획을 발표하였다[7]. 일본 측은 자신들이 개발중인 휴머로이드 로봇의 재질이나 전기 엔진을 장착하여 테스트 하길 원하고 있으며, 러시아는 FEDOR를 개량하여 미러링 기술을 보다 빠르게 사용할 수 있는 Teledroid를 실험 중이며 2020년 3-4월에 선보일 예정이었지만 코로나 등의 이유로 이후 일정은 미정인 상태이고 러시아-우크라이나 전쟁으로 국제우주정거장에서의 테스트도 무기한 연기된 상태이다. 
독일의 항공우주센터 DLR은 국제우주정거장이나 위성 수리를 위한 목적으로 자율 작동과 Telepresence 제어가 가능한 Justin 휴머로이드 로봇을 2009년에 선보였다[8]. Justin은 무게가 가볍고 행성 탐사를 하는 목적도 있기에 현재 국제우주정거장에 있는 승무원이 테이블릿 PC를 사용하여 지상의 Justin이 화성을 모사한 환경에서 태양전지판을 수리하는 것을 테스트 중이다. Justin은 2개의 손과 2개의 고해상도 카메라와 PMD 센서를 가지고 있으며, 몸통, 머리로 구성되어 있다. 손은 4개의 손가락으로 구성되어 있으며 머리에 있는 고해상도 카메라를 사용하여 팔의 거리감을 판단하기에 인간의 행동을 모사하는 게 가능하다. Justin 모델의 하부는 4 개의 스프링 기반 바퀴를 가지고 있기에 울퉁불퉁한 대지를 쉽게 이동가능하다. 상부 몸체는 43 자유도를 가지며 토크 센서를 사용하여 팔이나 손을 조작하는게 용이하며 사람이 가상 머신 장치를 착용하여 원거리에서 조절이 가능하다. Justin은 일반적으로 연구소 자체 개발 프로그램을 사용하지 않고 Matlab이나 Simulink 등의 상용툴로 프로그램되어 있다. 그래서 iPad를 통해 제어가 가능하다는 매우 특이한 장점을 가지고 있으며, 국제우주정거장에서 테이블릿 PC를 사용한 원격 제어가 가능하다. Justin은 길이가 약 1.9 m, 무게 200 kg, 탑재 중량 20 kg이며 팔은 14 자유도, 손은 24 자유도를 가지고 있다[9]. Justin과 함께 DLR은 2013년 TORO (Toque Controlled Humanoid Robot)를 선보였다[9]. TORO는 인간형으로 2개의 발을 가지고 있다. TORO의 키는 1.74 m, 무게는 76 kg으로 Justin에 비해 매우 가볍다. 이는 장애물을 올라가고 발사체 탑재 중량을 줄이기 위해서이다. Justin의 운송 가능 탑재 중량은 10 kg이며 전체 자유도는 39이다. 
인간형이지만 오히려 장난감에 가까운 Kirobo는 일본 최초의 우주 로봇으로 동경대, 도요타, JAXA 등이 공동개발하였다[10]. Kirobo는 크기 34 cm, 폭 18 cm, 무게 1 kg으로 음성과 목소리를 인식하여 언어를 처리하고 대화가 가능하며 얼굴 인식이 가능하다. Kirobo는 2013년 8월 JAXA의 H2 로켓을 통해 국제우주정거장 (Kirobo모듈)에 보내졌다. Kirobo는 우주에서 머물고 있는 우주 비행사의 대화 상대로 만들어졌으며, 국제우주정거장에서 약 18개월 동안 지내다 지구로 귀환하였다. 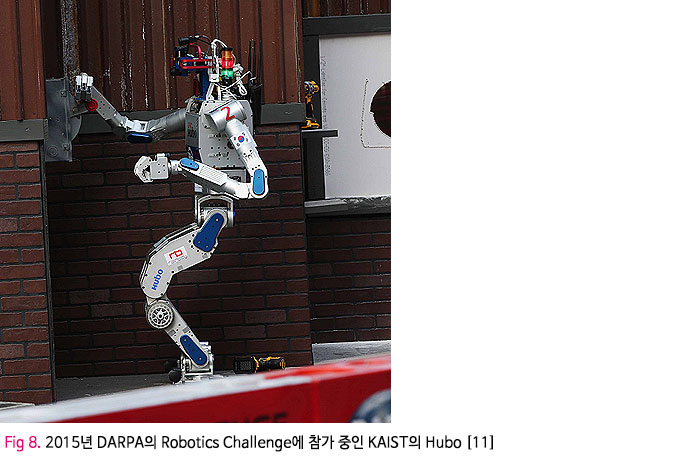
우리나라의 경우 KAIST의 Hubo가 2015년 미국 DARPA의 Robotics Challenge에서 우승한 바가 있으며 그 성능 또한 세계 여러 휴머로이드 로봇들과 비교해도 뛰어난 편이다. 하지만 앞서 살펴본 것과 같이 우주용 휴머로이드 로봇의 경우 대부분 국제우주정거장에서 그 성능을 검증하고 있다. 미국, 러시아, 유럽, 일본 등 국제우주정거장에 각 국가의 모듈을 가지고 있는 국가는 우주에서의 휴머로이드 로봇의 테스트가 가능하지만 우리나라의 경우 휴머로이드 로봇이 있더라도 이를 우주에서 테스트 해보기 힘들다. 하지만 우리의 기술로 만든 발사체, 달 탐사 위성 등 우주 분야에서의 우리 나라의 위상이 높아지고 있는 만큼 국제우주정거장 모듈 국가와의 협력을 통해 그 검증이 가능할 수도 있다. 또한 현재 각 국가에서는 국제우주정거장에서의 휴머로이드 로봇 성능을 검증하면서 개선하고 있기에 가까운 미래에는 달이나 화성에서 휴머로이드 로봇이 탐사하고 있는 모습을 볼 수 있을 것이다. |
- 휴머노이드(humanoid)
- A.I(Artificial Intelligence)
- JSC(Johnson Space Center)
- Robonaut 1(R1)
- 아르테미스 프로그램



전체댓글 0
(0).jpg)




.jpg)













