바퀴 구조는 평지에서 빠르고 안정적으로 이동할 수 있게끔 설계된 모바일 로봇의 기본적인 구동 메커니즘(로봇, 기계를 구동하는 기구 장치 구성을 총칭)이며 현재 바퀴와 더불어 트랙, 다리 등 다양한 메커니즘 기반의 모바일 서비스 로봇들이 개발되어 있다 [1-3]. 하지만 일상 생활에서 쉽게 마주칠 수 있는 턱, 계단 장애물에서는 안정성을 보장하지 못하며 빠른 속도로 주행할 시 동적 충격에 의해 로봇이 손상을 입거나 넘어져서 안전 사고를 유발할 수도 있다. 특히 바퀴 구조는 이론적으로 등반할 수 있는 최고 높이는 바퀴의 직경과 같기에, 다양한 폭과 높이를 가지는 장애물을 극복할 수 없다.
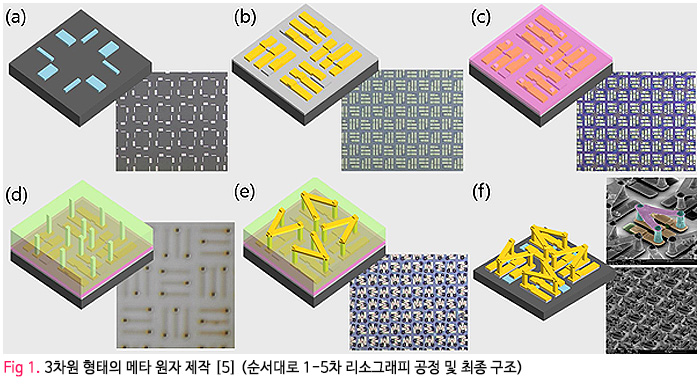
차세대 서비스 로봇은 사람의 다양한 생활 환경에서 업무를 안정적으로 수행해야한다. 이를 위해 개발된 다양한 턱 장애물을 극복할 수 있는 Fig. 1에서의 연구들이 있었다[4-7].
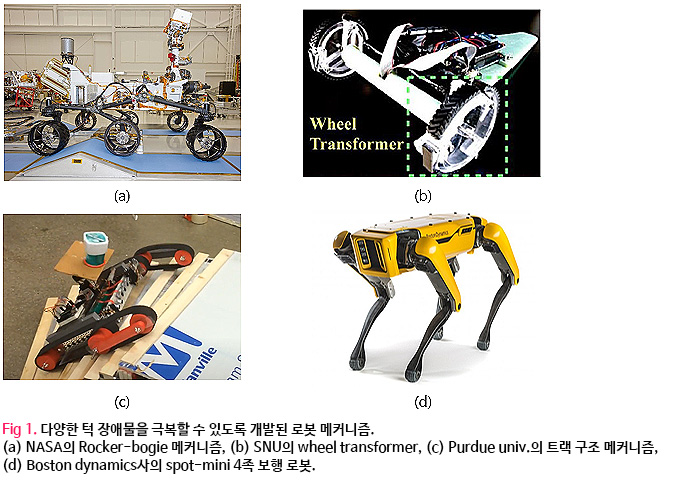
하지만 상기 로봇 메커니즘은 마찰력에 의존하거나, 턱을 찍고 넘어가는 등의 등반 전략을 가지고 있기에 로봇의 안정성에 큰 문제가 생길 수 있다. 이러한 점에서, 배달 로봇 및 기타 운송 서비스 로봇은 무게 중심이 위에 있을 수밖에 없기에, 운반물이 쏟아지거나 로봇이 넘어지는 안전 사고가 일어날 확률이 높다. 또한 다양한 환경에 적응할 수 있는 다리 메커니즘을 가진 로봇들은 평지에서 주행이 비효율적이며, 로봇의 자유도가 높기 때문에 제작 및 제어비용이 매우 크다. 따라서 일반적 상용화에는 한계점이 존재한다.
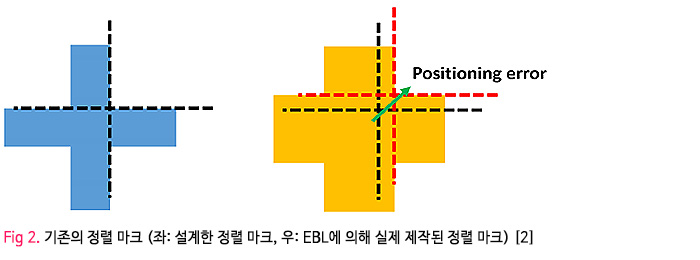
이러한 한계점을 효과적으로 극복할 수 있는 차세대 서비스로봇의 주행 전략으로서 부드러운 궤적을 위한 변형 바퀴 기반 로봇을 소개하며, 그 후엔 해당 주행 전략을 만족할 수 있는 변형 메커니즘을 소개한다. 우선, 다양한 턱 장애물 극복을 위한 주행 전략은 Fig. 2에서와 같다. 해당 변형 바퀴 로봇은 부드러운 궤적을 그리면서 다양한 실내 턱 장애물을 극복하여 로봇의 주행 안정성을 확보한다.
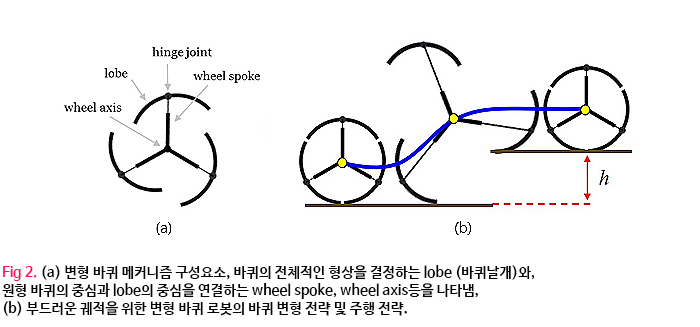
상기 그림과 같은 부드러운 궤적을 생성하기 위하여 바퀴의 형상을 턱 높이에 맞춰 변형한다. 이러한 전략을 통해 턱 장애물에 의한 지면과의 충격력을 감소시킬 수 있으며, Rocker-bogie 및 트랙 구조의 메커니즘과 달리 지면과의 마찰에 의존하지 않아도 된다는 큰 장점이 존재한다. 또한 4족 보행 로봇에 비해 적은 수의 구동기로 구현 가능하다는 점과 평지에서 가장 에너지 효율이 좋은 구름 접촉(rolling contact) 방식을 사용한다는 점에서 서비스로봇 용 일반적 상용화 가능성이 높다.
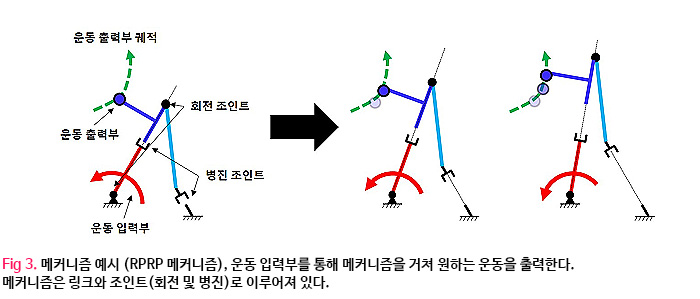
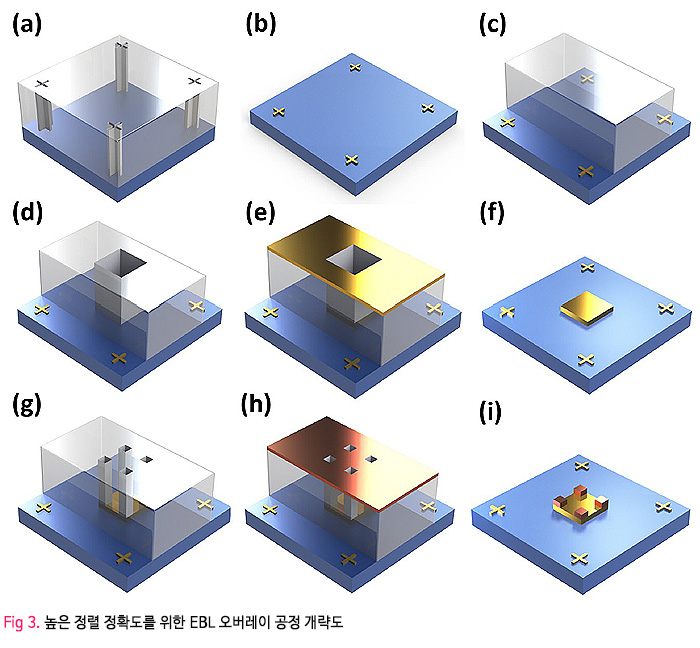
하지만 Fig. 2와 같은 부드러운 궤적을 그리면서 주행하기 위해서는 적절한 바퀴 변형이 필요한데, 이러한 바퀴 변형은 앞서 언급한 메커니즘에 의해 구현된다. 메커니즘이란 Fig. 3에서처럼 입력 운동을 출력 운동으로 만들어 주는 기계장치를 통칭한다.
바퀴의 형상 변형은 적절한 메커니즘을 통하여 구현하며, 상기 장애물 전략의 컨셉에 적합하도록 메커니즘은 세 개의 lobe를 동기화(synchronization)하여 운동할 수 있도록 배치되어 구동된다.
해당 장애물 극복 전략 기반의 변형 바퀴 로봇에 대하여 본문에서 소개할 내용은 다음과 같다.
(1) 장애물 극복 전략 상세 설명 및 요구되는 메커니즘의 운동 정의, (2) 필요한 운동을 만족할 수 있는 메커니즘 설계, (3) 2 자유도 변형 바퀴 기반 로봇 소개, (4) 간소화된 1 자유도 변형 바퀴 메커니즘 연구 소개.

실내 장애물 극복 시 높은 적응성을 지니는 변형 바퀴 기반 로봇에 대하여 Fig. 4에서 볼 수 있는 Kim et al. 의 다음의 극복 전략 연구가 있다 [8]. 해당 연구에서는 다양한 폭 과 높이를 가지는 턱 장애물에 대한 효과적인 등반 전략을 제시한다. a1 상태에서 볼 수 있듯 평지에서는 원형으로 주행하며, a2~4와 같은 상태를 통해 다양한 장애물을 등반한다. 또한 a5~7와 같은 상태를 통해 안정적으로 하강하는 기능 또한 지닌다. 이러한 전략은 모두 구름 접촉 기반이며, 해당 전략 아래 주행전략과 더불어 메커니즘의 2 자유도 전개 전략을 다음 연구에서 제안했다 [9]. Fig. 4에 나와있는 계단의 사이즈는 일반적인 실내 계단 장애물 형상 기준을 따라 범위를 설정한 것이다.
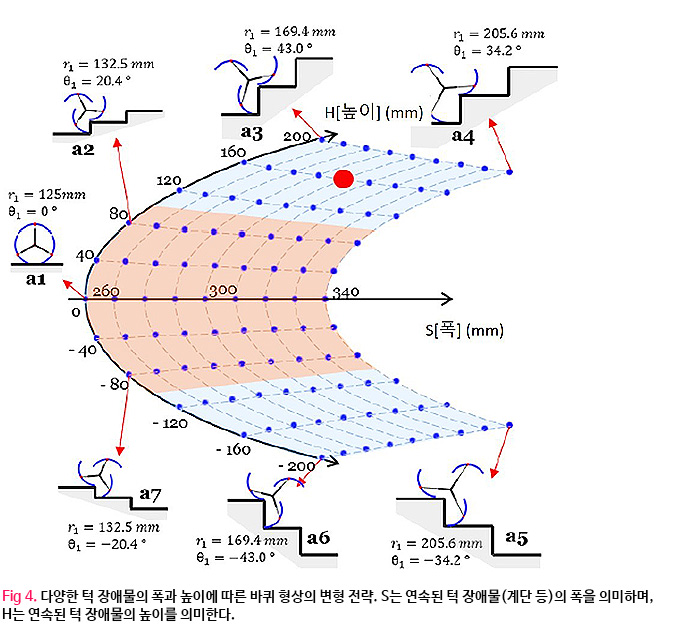
Fig. 5는 전체적인 주행과정에서 최적화 (Optimization)를 통하여 주행 중 가속도를 최대한 줄일 수 있게끔 설계하는 방법을 나타낸다. 위의 방법을 통하여 Fig. 3의 구름 접촉 전략 기반의 더욱 흔들림을 줄일 수 있는 주행 궤적을 생성할 수 있다.
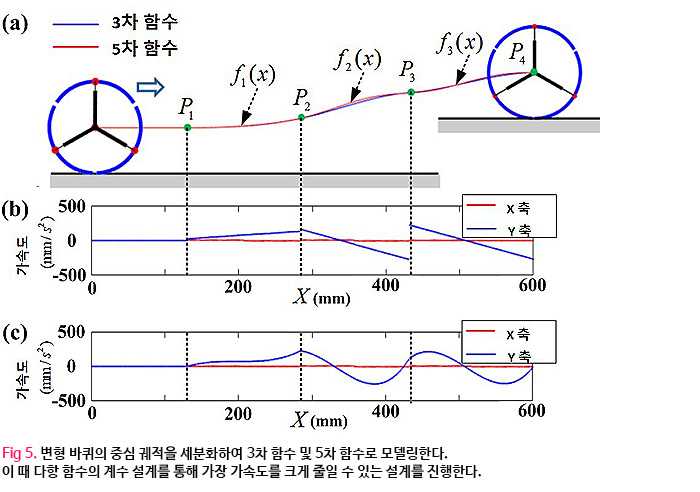
자세한 최적화 공식 및 최적 계수값은 해당 논문[9]에 나타나있다.
Fig. 5에서 설계한 궤적을 만족시킬 수 있으려면 Fig. 4에 나와있는 형상 변형 범위를 만족할 수 있는 메커니즘을 찾아야 한다. 그 전에 메커니즘을 통한 형상을 나타내는 변수는 Fig. 5와같이 나타낼 수 있다.
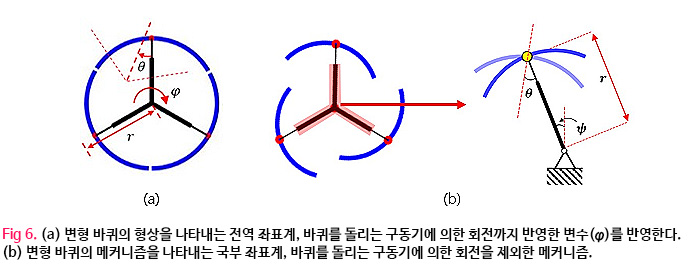
요구되는 장애물 극복능력을 위하여 Fig. 4에 표시되어 있는 r(반경),θ(lobe 각도) 등 범위를 만족할 수 있는 메커니즘의 설계가 필요하며, 메커니즘의 설계 및 선정은 다음 섹션에서 소개한다.

효과적인 변형 및 턱 장애물 극복을 휘하여 반경을 크게 키울 수 있음과 동시에 lobe 각도 또한 자유롭게 변화시킬 수 있는 메커니즘이 필요하다. Kim et al.은 다음의 연구에서 다양한 메커니즘들을 탐색하였으며, 여러 후보들 중에서 효율적으로 바퀴를 변형할 수 있는 2 자유도 PRRRP 메커니즘을 선정하였다 [10]. 자세한 메커니즘의 모습은 Fig. 7과 같다.
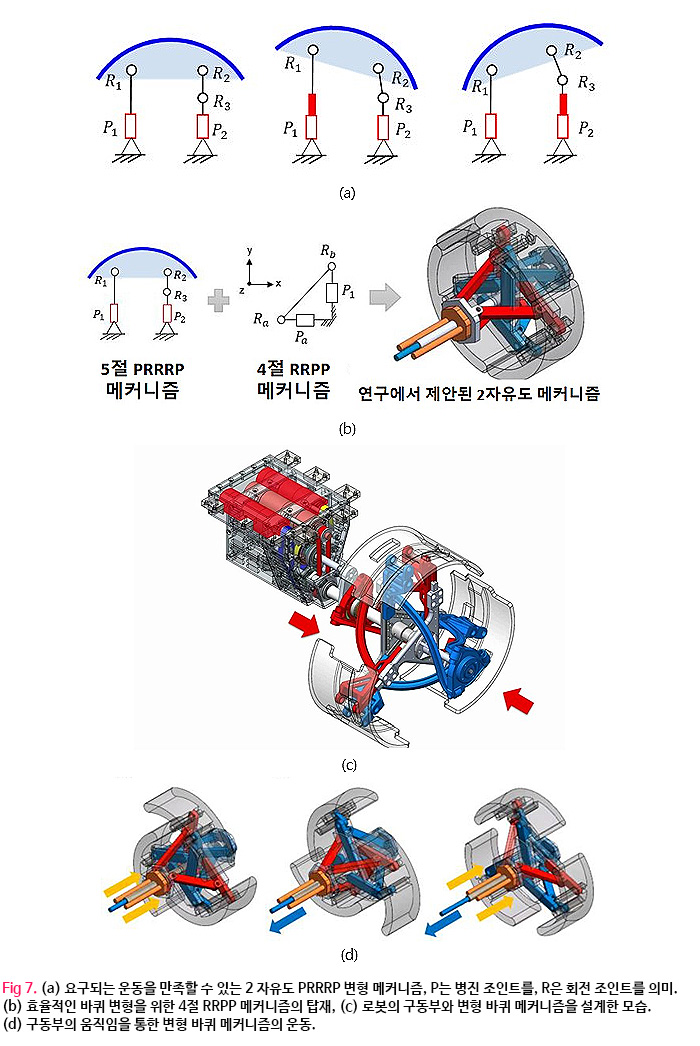
설계된 메커니즘은 2자유도 PRRRP 메커니즘으로, 두 개의 병진 조인트를 구동 시켜서 바퀴의 형상을 변형한다. 즉, P1과 P2의 움직임을 조절함으로써 바퀴 반경과 각도를 효율적으로 조절한다.

본 섹션에서는 설계된 메커니즘 기반으로 실제 제작된 변형 바퀴 기반 서비스 로봇 플랫폼을 소개한다. Fig. 8은 상세 설계 및 제작된 실제 로봇 (STEP, [8]) 이 턱 장애물을 극복하는 모습을 나타낸다.
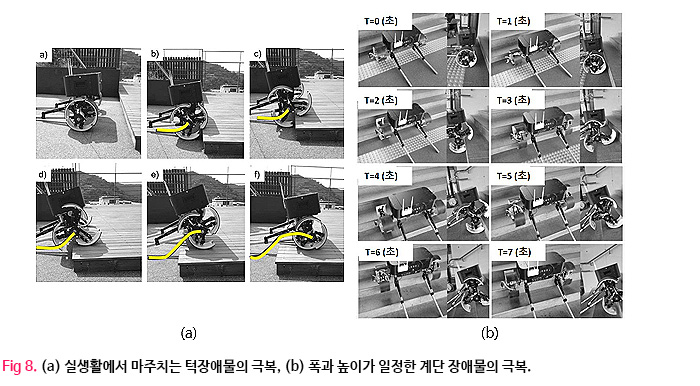
상기 모습처럼 효과적으로 주변 생활 환경에서 마주치는 장애물을 등반할 수 있다.

기존의 2 자유도 메커니즘 기반 로봇 STEP보다 구조적으로 단순하면서 구동기의 개수를 줄일 수 있어서(2 자유도: 2개 필요, 1 자유도: 1개 필요) 경제적인 1자유도 변형 바퀴 메커니즘의 설계 연구가 현재 진행중이다. 다양한 높이의 턱 장애물을 극복하기 위하여 1자유도 변형 바퀴 메커니즘을 설계할 수 있다. Fig. 9는 1자유도 메커니즘의 적응성을 갖는 운동과, 메커니즘이 가져야할 운동학적 요구조건, 설계한 메커니즘을 나타낸다.
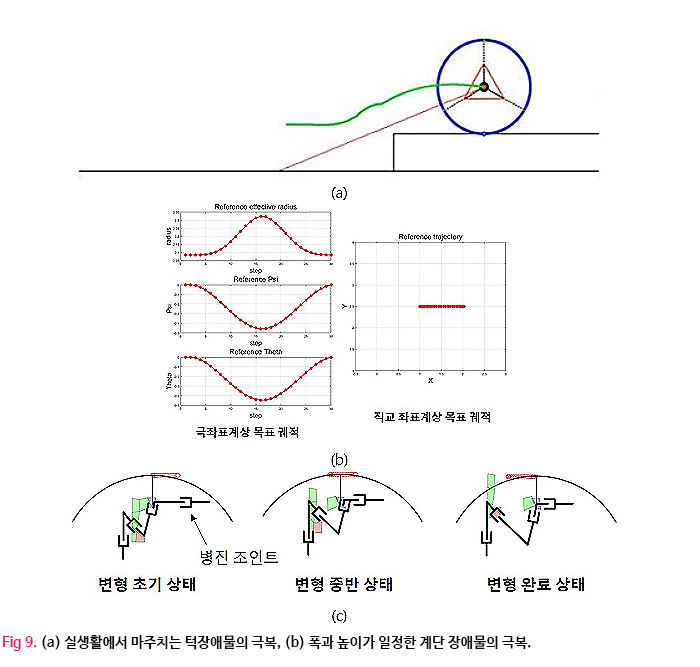
1자유도 4절 PPPP 메커니즘으로 원하는 운동을 구현할 수 있으며, 해당 메커니즘을 통하여 100 mm의 턱(바퀴 반지름의 80%)까지 효과적으로 극복할 수 있다. 이렇게 필요한 운동을 만족할 수 있는 메커니즘의 설계를 통해 변형 바퀴 메커니즘을 갖는 모바일 로봇의 가장 중요한 안정적인 턱 장애물 극복 성능을 구현할 수 있다.
완만한 궤적을 그리면서 다양한 장애물을 극복할 수 있는 변형 바퀴 메커니즘을 갖는 모바일로봇은 미래의 서비스 산업에서 사람의 노동을 도와주거나 대체할 수 있는 유용한 차세대 서비스 로봇이 될 수 있다. 이때 해당 로봇은 안정성과 적응성을 가져야 하는데, 이는 로봇의 하드웨어(메커니즘)의 적절한 설계를 통해 실현될 수 있다. 현재까지 2 자유도 PRRRP 메커니즘 및 1 자유도 PPPP 메커니즘 등 유용한 메커니즘을 통하여 변형 바퀴 로봇의 핵심 요소를 설계하였고, 2 자유도 메커니즘에 대해서는 성공적으로 장애물을 극복하는 성능이 검증되었다.
추후 연구 과제는 목표하는 턱 장애물 높이 및 수송하는 화물의 종류에 따라 힘의 이득 등을 고려하여 설계할 수 있게끔 더욱 체계적인 메커니즘 설계 방법을 개발하는 등, 실제 로봇 주행 성능과 메커니즘 사이의 관계를 분석하여 로봇의 타겟 성능에 맞춰 최적화된 메커니즘을 설계하는 것이다. 이를 통해 각기 다르게 주어진 업무에 가장 최적인 메커니즘을 설계하여, 모바일 서비스 로봇이 민첩하지만 안정적으로 주변 상황에 유연히 적응하며 훌륭하게 업무를 수행할 수 있을 것이라 기대된다.
 
|







(0).jpg)




.jpg)













