지금까지 뇌 손상 환자들의 불편한 신체의 기능 회복을 돕기 위해 많은 재활 로봇들이 개발되어 왔다. 재활 치료 분야에서 고강도, 수행과제 중심적, 그리고 반복적인 동작 수행은 뇌 손상에 의해 악화된 신체의 기능 회복에 효과적이라 알려져 있다. 특히 상지 재활 로봇은 이러한 노동 집약적인 재활 치료를 간편하고 정밀하게 제공할 수 있으며, 로봇 재활이 뇌 손상 환자의 신체 기능 회복에 효과적임이 많은 선행연구들을 통해 입증되었다.
하지만 로봇을 활용한 상지 재활치료가 작업치료사 혹은 물리치료사에 의해 제공되는 기존의 재활 치료보다 효과적인가에 대한 의문은 여전히 과제로 남아있다. 동일한 기간과 강도의 조건에서 기존의 재활 치료와 로봇 재활 치료 간에는 차이가 없으며, 기존의 재활 치료에 로봇 재활 치료를 더하면 신체 기능 회복이 촉진되는 것으로 보고되었지만 이마저도 손, 손목을 제외한 어깨, 팔꿈치 같은 특정 신체 부위에 제한된다. 상지 재활에 로봇을 최대한 활용하기 위해서는 로봇 재활의 효율성을 높이는 것이 필요하지만, 로봇 재활 치료 효과를 극대화하기 위한 최적의 조건에 대한 연구는 많이 이루어지지 않고 있다.
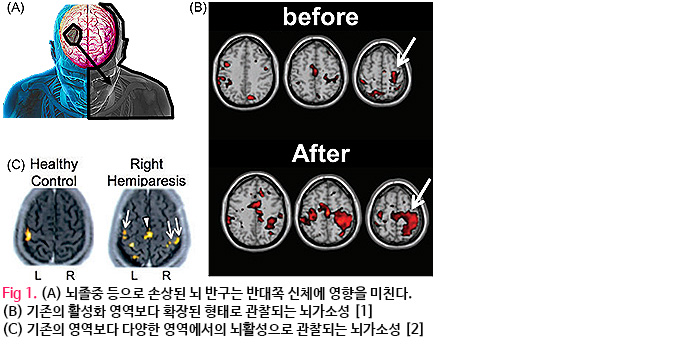
뇌가소성이란 뇌 시스템이 구조 및 기능을 재구성하는 능력으로 뇌 손상 환자의 운동 기능 회복을 위한 기본 메커니즘이다. 뇌가소성에 의한 운동 기능 회복은 외부 자극의 적절한 조작을 통해서 대뇌피질의 활성(이하 뇌활성)을 조절함으로써 이루어진다 (Fig.1). 하지만 재활 로봇 치료에 의한 대뇌 피질 효과에 대해서는 알려진 바가 많지 않다.
기능적 자기공명영상, 양전자 방출 단층촬영 및 기능적 근적외선 분광법 (functional near-infrared spectroscopy; fNIRS)을 포함한 기능적 신경 영상 기술은 외부 자극에 의한 뇌 활성화에 대한 중요한 정보를 제공한다 (Fig. 2).

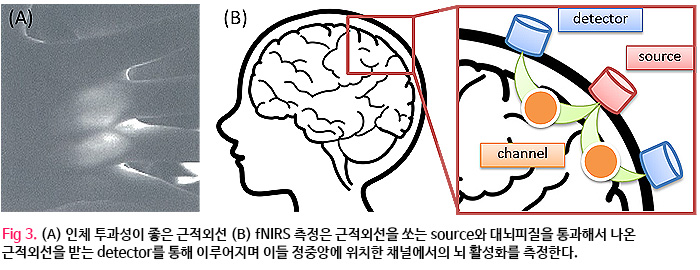
이 중 fNIRS는 혈액의 고유한 광학적 흡수를 기반으로 하는 대뇌 피질의 활성화와 관련된 혈역학적 반응을 측정하는 비침습적 방법을 제공한다 (Fig. 3). fNIRS는 다른 기능적 신경 영상 기술과 비교하여 움직임 인공물 및 금속 물질에 대한 민감도가 낮다는 고유한 이점이 있기 때문에 fNIRS는 재활 로봇 치료 중 뇌 반응 연구에 적합한 것으로 사료된다.
지금부터 뇌활성에 기반하여 손, 손목 재활 로봇의 최적의 재활 치료 속도에 관해 조사한 연구를 소개하고자 한다. 최적의 조건을 찾는 변수로써 속도를 선택한 이유는 치료사와는 달리 로봇은 지속적으로 여러 빠르기의 속도를 일정하게 제공할 수 있기 때문이다. 로봇이 제공하는 수동 재활 동작은 고유 감각 입력을 통해 뇌활성화를 유도하고, 이는 fNIRS를 통해 측정되었다.

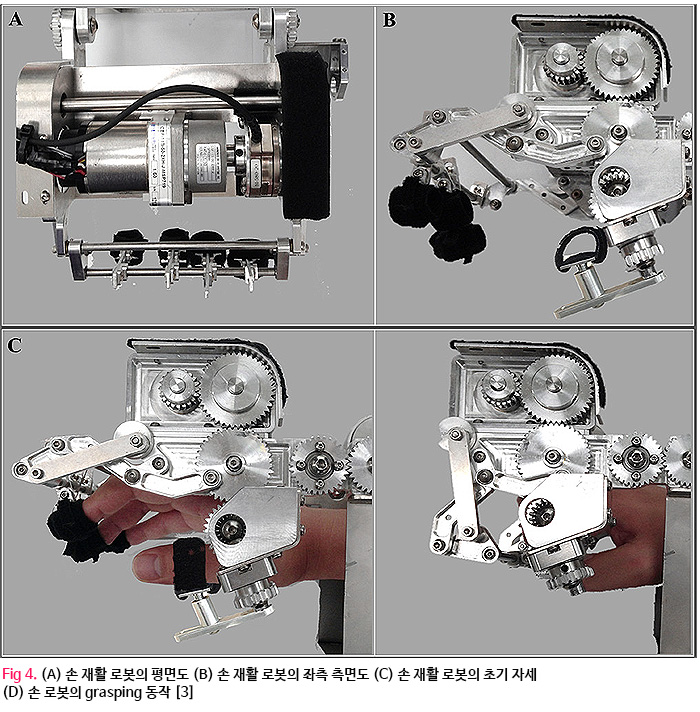
이번 연구에 사용된 재활 로봇은 수부 재활 로봇으로 손 부분과 손목 부분으로 나눌 수 있다. 손의 grasping 동작과 손목의 굴곡 및 신전 동작은 각각 1자유도로 구현되었다. 자세히 말하자면, 손의grasping 동작은 실제 grasping 동작의 궤적을 참고, 4절기구 메커니즘을 통해 구현되었다 [3]. 엄지와 네 손가락의 구동부는 서로 연결되어 있으며 모터가 정방향으로 90deg 회전하면 grasping 동작을, 역방향으로 90deg 회전하면 초기 자세로 돌아가는 동작을 수행하였다. 이 때 grasping 운동을 위한 구동력은 전완부 파트에 설치된 케이블로부터 기어에 의해 전달되었다 (Fig. 4).
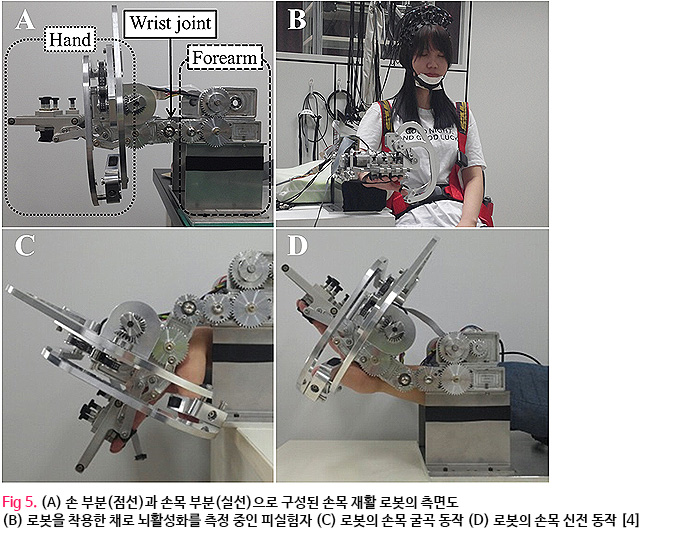
손목 로봇은 굴곡/신전 구현을 위해 단순 1자유도 구조로 이루어져있다. 굴곡/신전 만을 고려한다면 사람 손목은 하나의 회전 조인트를 가지는 1자유도 기구학적 모델로 단순화시킬 수 있기 때문이다. 손목 로봇은 1자유도 기어 구동 메커니즘을 통해 구현하였으며, 전완부를 고정시켜주는 전완부 파트, 손을 고정시켜주는 손 파트 및 손목 관절을 움직여주는 손목 회전 조인트로 이루어진다.
손목 조인트를 회전시켜주는 구동모터는 전완부 파트에 위치하며 손가락, 손바닥 및 전완부를 아래쪽에서 받쳐주는 받침대가 손 및 전완부 파트에 설치되어 있다. 이를 착용하기 위해서는 손가락을 전완부 파트 뒤쪽으로부터 집어넣어 손 바닥 및 전완부를 먼저 고정시킨 후 손가락을 고정시키는 과정이 필요하다.
손가락, 손 및 전완부가 모두 고정된 후에 로봇은 수동 손목 운동을 수행한다. 손이 바닥과 수평을 이루는 각도(0deg)를 중립이라 할 때Full ROM의 손목 굴곡(-80deg)/신전(+75deg) 운동이 wrist joint의 회전 운동으로 구현된다. 이 때 wrist joint의 회전 운동을 위한 구동력은 전완부 파트에 설치된 모터로부터 기어에 의해 전달되었다 (Fig. 5).
손 및 손목 로봇의 구동 시스템은 a brushless DC motor with encoder, harmonic drive, 그리고 force-torque sensor로 이루어졌다. 또한 실시간 제어를 위해서, Linux 와 Real Time Application Interface for Linux (RTAI)를 활용하였다. 엔코더 및 Sensoray 보드를 사용하여 실시간 감지 제어가 이뤄졌으며 정확한 위치 제어를 위해 TDC(time delay control)가 사용되었다. 로봇은 최대 2Hz의 속도로 움직일 수 있지만 손 실험에서는 0.25Hz, 0.5Hz, 1Hz를, 손목 실험에서는 0.25Hz, 0.5Hz 및 0.75Hz를 각각 느린, 보통, 그리고 빠른 속도로 설정하여 실험을 진행하였다. 예를 들어 1Hz란 한번의 완전한 동작 1회가 1초만에 수행되는 것을 의미한다.

로봇에 의한 수동 손 그리고 손목 동작이 유발시키는 뇌 활성을 측정하기 위해서 fNIRS system을 활용하였다. Task related hemodynamic changes에 가장 민감한 마커인 산소헤모글로빈(이하HbO)의 상대적 변화를 측정하는 기기들 중 신체를 움직이는task(예: 걷기) 수행 도중 측정이 가능하며 금속 재료에 덜 민감한 장점을 가지고 있기 때문이다. 3가지 파동 길이(780,805, and 830nm)를 가지는 continuous wave laser diodes가 특징인 fNIRS system을 통해 뇌 활성을 측정하였다.
손 및 손목 동작에 따른 뇌 활성 측정 부위는 Brodmann’s area (BA)와 뇌의 해부학적 위치를 고려하여 the primary sensory-motor cortex (SM1; BA1, 2, 3 and 4)를 선택하였다. 본 연구에서는 20개의 NIRS 전극 (10 sources and 10 detectors)를 좌뇌에 3 X 7 직사각형 배열로 배치함으로써 총 31개의 채널 세팅을 할 수 있었다. 오른 손 및 손목의 로봇 수동 운동이 일어나는 동안 좌뇌의 각 채널에서 HbO을 측정하였다 (Fig. 6).
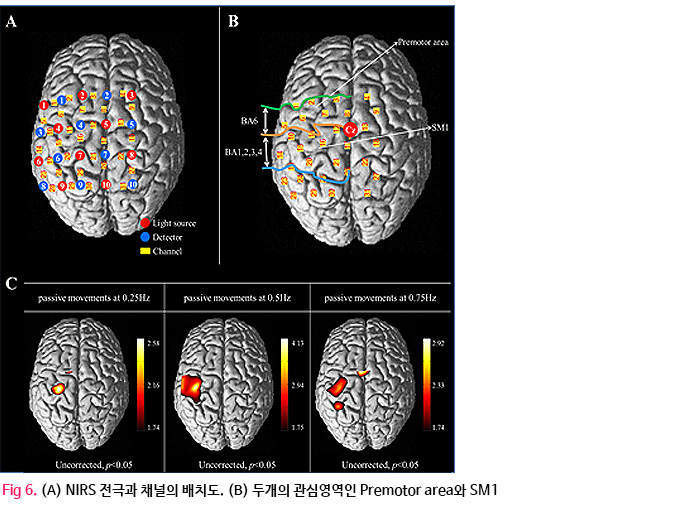
손 및 손목의 로봇 수동 운동에 의한 뇌활성에 대한 재현성을 보기 위해서 어떤 프로토콜을 세웠는지 기술한다. 10초 쉬고 20초 로봇 수동 운동 제공하고 10초 쉬는 것을 총 3번 반복하는 블록 디자인에 기초하여 측정이 이루어졌다.
손 재활 로봇 피실험자는 9명, 손목 재활 로봇 피실험자는 23명 모집하였다. 피실험자는 실험하는 동안 정상적인 조명을 가진 shielded room에서 편하게 의자에 앉아 허리를 펴고 벽을 바라보도록 지시받았다. 체간의 움직임을 막기 위해 스트랩으로 트렁크를 의자에 단단히 고정시켰다. 그들은 오른손에 손목 재활 로봇을 착용하도록 지시받았다. 전완부, 손, 그리고 손가락은 실험 진행자가 직접 재활 로봇에 고정시킨 후 뇌 활성화 측정을 진행하였다.

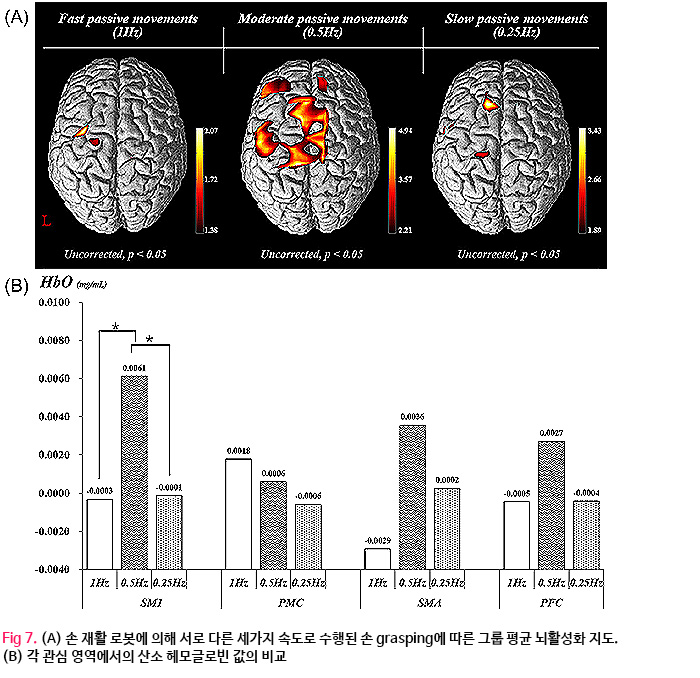
오른 손의 수동적 움직임이 손 재활 로봇에 의해 수행되는 동안, 좌측 SM1의 HbO 값은
1Hz(SM1:-0.0030)와 0.25Hz(SM1:-0.0010)에서 수행된 움직임에 비해 0.5Hz (SM1:0.061)에서 유의하게 더 높았다 (p < 0.05). 그러나 1Hz와 0.25Hz 사이에서는 유의한 차이가 보이지 않았다(p >0.05).
게다가 다른 관심영역들에서는 운동 속도에 따른 HbO 값에 유의한 차이가 없음이 발견되었다 (Fig 7. B). 뇌활성화 지도를 기반으로 한 HbO의 그룹 분석 결과는 0.5Hz에서 모든 관심영역에서의 유의한 뇌활성화가 관찰되었다. 대조적으로 1Hz와 0.25Hz에서는 상대적으로 적은 뇌 활성화가 관찰되었다 (Fig 7. A).
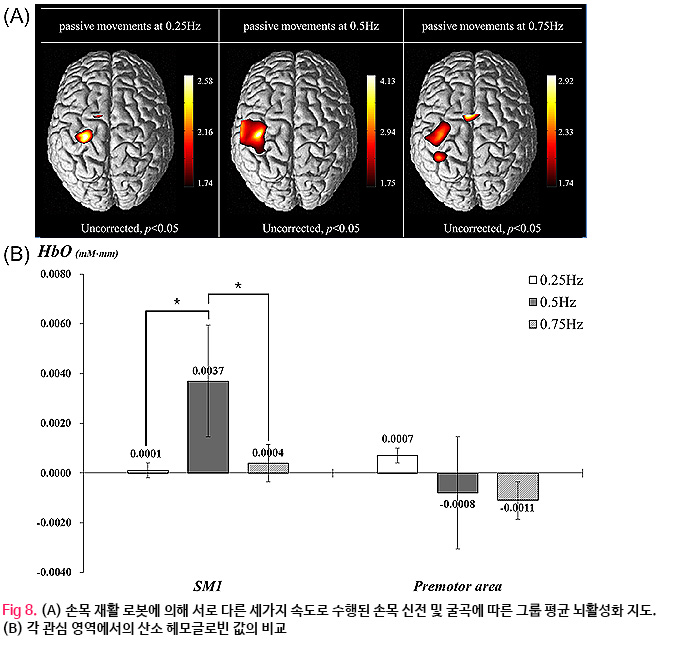
오른 손목의 수동적 움직임이 손목 재활 로봇에 의해 수행되는 동안, 좌측 SM1의 HbO값은 0.25Hz (SM1:0.0001)와 0.75Hz (SM1:0.0004)의 조건에 비해서 0.5Hz (SM1:0.0037)에서 유의하게 더 높았다(p<0.05). 하지만 0.25Hz와 0.75Hz 사이에서는 유의미한 차이가 보이지 않았다.
다른 관심영역인 PMA에서는 세개의 속도 사이에서 유의미한 뇌활성화의 차이를 관찰할 수 없었다 (Fig. 8. A). 뇌활성화 지도를 기반으로 한 HbO의 그룹 분석 결과에 관해서는, 모든 속도에서 좌측 SM1에서의 유의미한 뇌 활성화를 관찰할 수 있었다. 특히 0.5Hz에서는 영역의 넓이 그리고 위치의 정확도 면에서 가장 높은 뇌 활성화를 보였다.
이번에 소개한 연구에서 우리는 손 및 손목 재활 로봇이 제공하는 수동 움직임을 세가지 다른 속도로 수행할 때 발생하는 뇌 활성화의 차이를 조사하였다. 손 운동에서는 빠른 속도로써 1Hz의 움직임을 하는데 무리가 없었으나 손목 관절의 굴곡에서 신전까지의 운동 범위를 1Hz의 속도로 수행하는 것은 너무 빨라 피실험자가 수용할 수 없었다. 게다가 뇌졸중 환자의 손목 관절의 움직임을 수행하기에는 1Hz가 빠르다고 보고한 선행 연구 사례도 있었다 [5].
그리고 최적의 속도를 결정하기 위해 fNIRS에서 가장 보편적으로 활용되는 HbO를 뇌 활성화의 지표로 사용하였다. HbO는 신경세포의 산소 소비 등 대뇌 피질의 혈류역학적 변화를 간접적으로 감지할 수 있기 때문이다. 연구 결과를 요약하면 다음과 같았다:
(1)손 및 손목 재활 로봇에 의해 수행된 수동 움직임은 반대쪽 관심영역의 활성화를 유발했으며, 특히 SM1에서의 활성이 두드러졌다; 그리고 (2) SM1에서의 가장 큰 뇌 활성화는 보통 빠르기인 0.5Hz에서 수행된 수동 움직임에서 관찰되었다.
이번 연구에서 손 및 손목 재활 로봇은 고유수용성 감각 활동을 통해 뇌 활성화를 유도하는 것으로 사료된다. 고유수용성 감각이란 관절의 움직임과 위치에 대한 감각을 포함하는 촉각의 감각양식을 의미한다. 재활 로봇에 의한 수동 움직임이 세가지 다른 속도로 움직일 때, 서로 다른 양의 고유수용성 감각이 유발되어 뇌 활성화의 차이를 유도한 것이다. 따라서 느린 속도(0.25Hz)와 빠른 속도(0.75Hz and 1Hz)보다는 적당한 속도인 0.5Hz에서 수행되는 수동 로봇 움직임이 충분한 고유수용성 감각을 유발하였다고 추측할 수 있다.
뇌활성화 영역 결과는 로봇 사용 여부에 관계없이 선행 연구와 유사하다는 점에 주목할 필요가 있다. 정상인, 뇌손상 환자 여부 및 로봇 사용 여부에 관계없이 동일한 영역이 활성화됨을 알 수 있었다. 로봇을 사용하지 않고 수동 움직임만으로 SM1 영역이 활성화 됨이 보고되었다 [5].
로봇을 활용한 연구에서도 SM1 영역이 활성화되었다고 보고되었다 [6, 7]. 로봇의 속도와 관련된 선행연구로는 PET를 뇌활성화 측정 수단으로 활용, 능동적인 검지 손가락 두드리기 운동의 속도가 0.5Hz에서 4Hz까지 빨라질수록 뇌활성화도 같이 증가한다는 보고가 있었다 [8]. 또한 fMRI를 활용하여 동일한 검지 손가락 두드리기 운동을 할 때 2Hz에서 4Hz까지는 뇌활성화가 정비례하며 증가하나 5Hz에서 6Hz 사이에서는 뇌활성화의 변화가 없음을 확인한 선행연구도 있다 [9].
초기의 재활 로봇 연구들은 훈련 지속 시간/운동 강도와 같은 동일한 조건에서 로봇재활과 기존 치료를 비교하는 데에 초점을 두었다면 본 연구는 다양한 속도를 지속적으로 제공가능 한 로봇의 고유한 특성에 주목, 최적의 운동 속도 조건에 초점을 맞추었다. 이 연구는 재활 로봇이 손 및 손목을 수동적으로 움직일 때 최대의 뇌 활성화를 이끌어 낼 수 있는 최적의 속도를 보고한 최초의 연구이다. 정상인에게도 최적의 속도가 존재한다는 가설을 부분적으로 확인하였고, 본 연구 결과를 통해 뇌졸중 환자에게 최적의 속도가 존재할 가능성을 제시하였다.
또한 0.5Hz의 보통 빠르기로 로봇의 수동 움직임으로 가장 큰 뇌활성화를 확인함으로써 뇌졸중 환자의 신체 기능 회복을 확인하기 위한 평가 기준도 제시하였다. 이번 연구의 한계점으로는 우선 본 연구에서 활용한 세가지 속도를 좀 더 세분화하여 뇌 활성정도를 측정하지 못한 것이며, 둘째, 자발적인 움직임이 없다는 것을 좀 더 명확하게 확인하기 위해 근전도 센서를 활용하지 못한 점이다.
앞으로의 연구 방향은 로봇의 능동적 움직임으로 인한 피질 활성화 및 최적의 속도를 조사하고 그 결과를 수동적 움직임과 비교하는 것이다. 수동적 움직임과 능동적 움직임으로 인한 뇌 활성화 영역이 유사할 뿐만 아니라, 능동적 움직임이 수동적 움직임보다 훨씬 더 높은 뇌활성화를 가져온다는 선행 연구 결과가 있기 때문이다 [10]. 하지만 이 선행연구는 재활 로봇을 활용하지 않고 얻은 것이며, 로봇을 사용하여 두가지 운동의 뇌활성화와 최적의 속도를 비교한 연구는 아직 보고된 바가 없다.
결론적으로 우리는 손 및 손목 재활 로봇이 세가지 다른 속도에서 수행하는 수동적 움직임의 최적의 속도를 조사하였고, 그 결과 반대쪽 SM1에서의 가장 큰 활성화가 중간 속도인 0.5Hz에서 관찰되었음을 발견하였다. 우리의 결과는 속도 측면에서 손 및 손목 재활 로봇의 재활 운동을 위한 최적의 조건을 제시한다. 따라서 본 연구의 결과는 보다 효과적이고 실증적인 로봇 재활 치료에 유용한 데이터를 제공할 수 있을 것으로 기대한다. 또한 fNIRS는 재활 로봇에 의한 뇌 활성화 관찰 연구에 유용한 평가 도구라 사료된다.


|







(0).jpg)




.jpg)













