


| 손은 일상 생활의 다양한 작업들을 수행하기 위하여 필수적인 신체 부위이다. 그러나 다양한 사고나 질환으로 인해 수부가 절단될 수 있으며 이로 인해 일상 생활이 어려워진다. 또한, 절단 환자는 다른 사람들에게 절단된 손을 내보이는 것을 꺼리기 때문에 심리적으로도 위축되어 사회적인 단절로 이어질 수 있다. 이런 수부 절단 환자의 손기능을 되찾아 주기 위하여 오랜 기간동안 다양한 의수들이 개발되어 왔으며, 로봇 기술을 발달로 최근 높은 자유도를 가지며 다양한 작업이 가능한 전동 의수들이 개발 및 제품화되었다. (Fig. 1). 그러나, 의수의 사용도에 대한 연구에 따르면 높은 비율의 의수 사용자들이 중도에 의수 사용을 하지 않게 되거나 심미적인 목적으로 손의 형태를 띄는 수동적인 의수를 사용하는 것으로 나타났다 [1]. 1000만원이상 하는 의수의 가격적인 부담과 가격대비 사용성, 제어의 직관성 및 기능 부족으로 사용을 중단을 한다는 피드백이 많았다 [1]. 
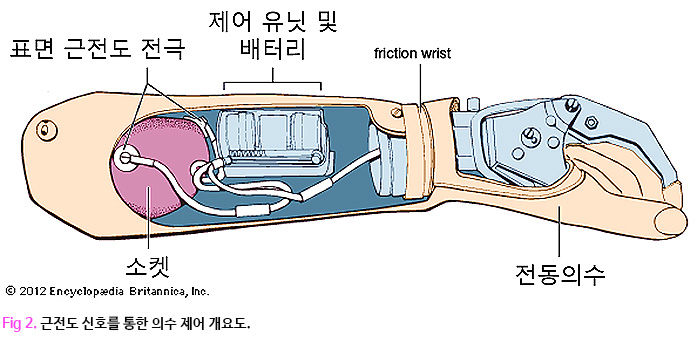
의수 하드웨어의 성능의 발전에도 불구하고 사용성이 떨어지는 가장 큰 이유 중 하나는 사용자의 다양한 동작 의도를 정확하고 빠르게 인식하는 알고리즘 및 측정 시스템의 부재다. 대부분의 의수는 근전도 센서를 절단 뒤 잔여하는 팔뚝에 부착하여 근육이 수축할 때 발생하는 전기적 신호의 측정 값을 통해 의수의 동작을 제어하는 형태로 되어 있다 (Fig. 2).
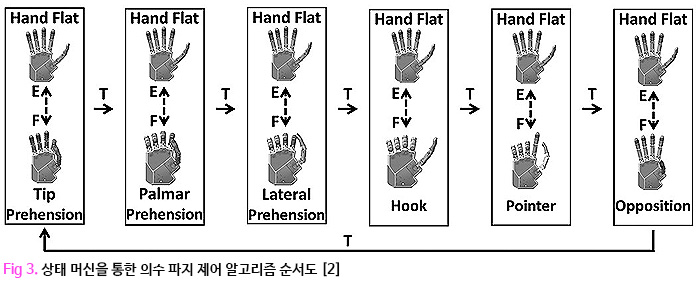
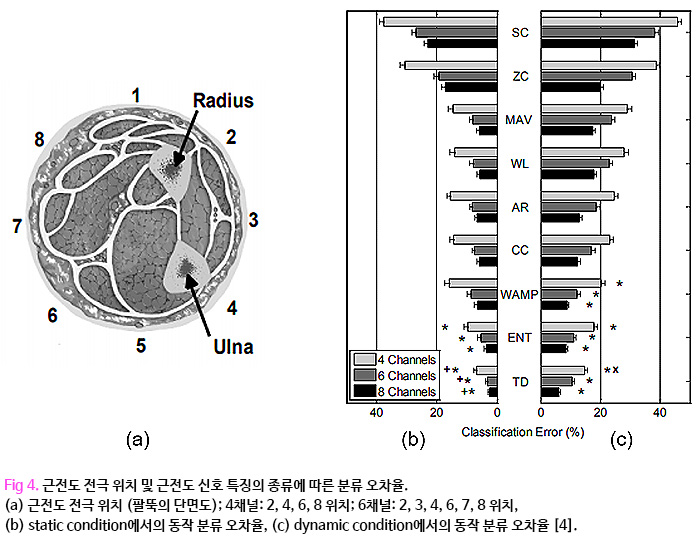
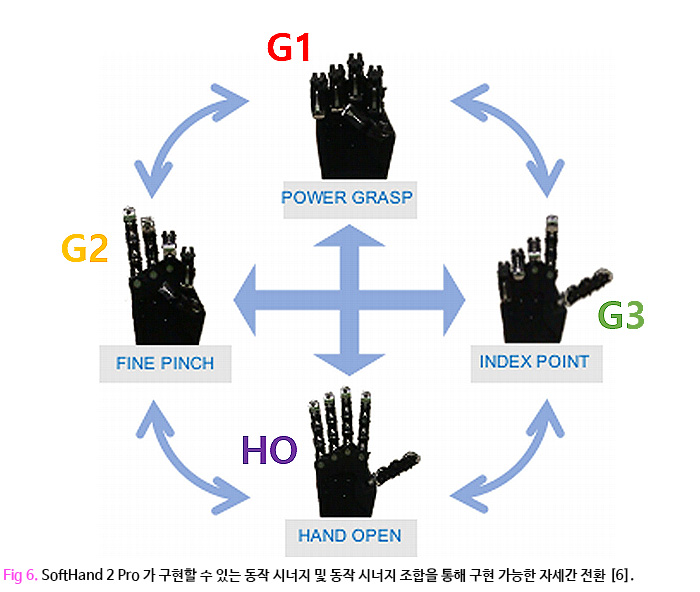
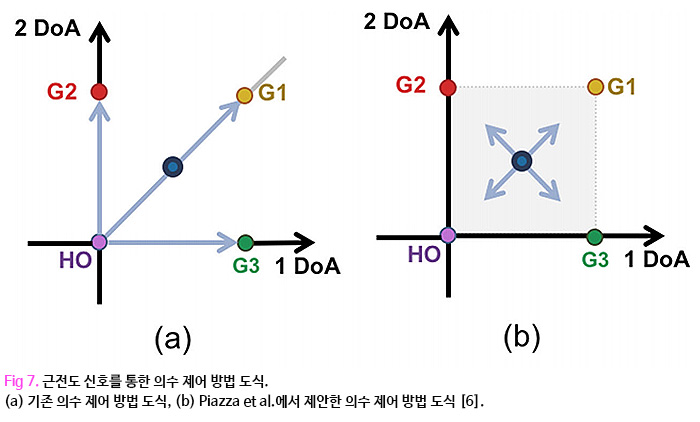
근전도 센서를 활용하여 정확하고 안정적으로 사용자의 동작 의도를 파악하기 위해서는 근전도의 부착 위치, 근전도 센서의 개수, 근전도 신호 처리 방법, 의도 분류 알고리즘 등 다양한 요소를 고려해야 한다. 근 10년간 다양한 동작의도에 대한 정확하고 안정적인 인식을 위하여 다양한 측정 시스템 및 의수 제어방법들이 연구되어왔다. 본문에서는 다양한 동작의도를 구분하기 위한 다양한 측정 시스템과 제어 방법에 대한 연구 동향을 소개하고자 한다. 제한된 정보를 활용해서 다양한 기능을 수행할 수 있도록 하기에 용이한 방법 중 하나는 상태 머신을 활용하는 것이다. 그래서 많은 상용 의수들의 경우 간단한 측정 시스템을 통해 다양한 파지 자세를 구현하기 위해서 상태 머신을 활용한다. 근전도 센서를 굽힘근과 신전근 근처에 부착하여 손을 열고 닫는 의도를 각각 굽힘근과 신전근을 통해서 인식하고, 굽힘근과 신전근을 동시에 수축(co-contraction)하는 신호를 통해서 파지 자세를 변화시킨다 (Fig. 3) [2]. 본 방법들은 센싱 시스템의 설계를 단순화할 수 있다는 장점이 있으나, 사용자의 경우 원하는 파지 자세를 선택하고 나서 동작을 수행하기 때문에 직관적으로 원하는 동작은 원하는 타이밍에 수행하기 어렵다. 이런 한계를 극복하기 위해서 더 많은 수의 근전도 센서를 부착하여 동작의도 인식에 활용하는 연구가 이루어지고 있다. High-Density (HD) 근전도 센서를 통한 동작의도 인식은 팔뚝 주변에 더 많은 근전도 센서를 부착하여 다양한 동작의도를 근전도 센서 신호의 주요 특징(feature) 및 패턴으로부터 파악하는 방법이다. 동작의도 파악을 위해 주로 Hudgins의 연구에서 제안했던 시간의존(Time dependent) 근전도 신호 특징을 활용한다 [3]. 주요 근전도 신호의 특징들은 특정 time step 만큼 이동하는 200ms의 간격의 window 안의 데이터로부터 계산되며 그 종류는 다음과 같이 정리할 수 있다. 1) Mean Average Value (MAV): Window 안의 근전도 신호 데이터에 대한 절대값의 평균 2) Wave Length (WL): Window 안의 근전도 신호 waveform의 총 길이로 각 time step에 대한 근전도 신호의 절대 변화량의 총합을 의미한다. Fig. 4. 근전도 전극 위치 및 근전도 신호 특징의 종류에 따른 분류 오차율. (a) 근전도 전극 위치 (팔뚝의 단면도); 4채널: 2, 4, 6, 8 위치; 6채널: 2, 3, 4, 6, 7, 8 위치, (b) static condition에서의 동작 분류 오차율, (c) dynamic condition에서의 동작 분류 오차율 [4]. Fig. 4(b-c)의 결과를 통해 사용하는 근전도 센서의 수가 증가함에 따라 정확도가 높아짐 또한 확인 할 수 있다. 많은 근전도 센서를 사용할수록 분류 정확도는 증가하지만 시스템의 복잡도가 증가하게 된다. 정확도를 높게 유지하는 최소의 근전도 센서 수 및 부착 위치를 찾는 것은 실제 활용 가능한 HD-근전도센서 기반 의도 인식 시스템을 개발하는 데 있어서 중요하다. 동작의도를 분류하는 알고리즘으로는 Linear Discriminant Analysis (LDA), support vector machine (SVM), Neural Network (NN) 등이 사용된다. LDA는 입출력 데이터에 대해 선형적인 hyperplane을 통해 분류하는 방식이고, SVM은 데이터를 비선형 매핑을 통해서 고차원원으로 변환한 뒤 hyperplane으로 분류하는 방식이다. Piazza et al.의 연구에서는 [6] 분류되는 손 자세에 따라 switching 하여 동작을 수행하는 것이 아니라 동작 시너지의 조합을 통해 연속적인 변화가 나타나도록 제어하였다. 이 연구에서 사용한 SoftHand 2 Pro는 두개의 주요 동작 시너지에 따라 움직이는 의수다 (Fig. 6). Piazza et al.의 연구에서는 8개의 근전도 신호를 부착하여 5개의 동작에 대해서 분류를 하였으며 5개의 동작에 대한 분류 확률을 이용하여 2개의 시너지에 대한 성분을 계산하고 조합하여 의수를 제어하였으며 이를 활용하여 box and block test (BBT), Jebsen Taylor Hand Function Test (JTT)에서의 다양한 동작들을 직관적으로 수행할 수 있음을 확인하였다 (Fig. 8). 의수의 사용성을 높이고 다양한 파지 동작을 수행할 수 있도록 하기 위해서 다양한 연구가 진행되어 왔다. 근전도의 수를 늘리고 다양한 기계학습 방법을 적용함으로써 사용자의 동작의도를 비교적 정확하게 파악할 수 있다는 것을 확인 할 수 있었으며, 동작 시너지의 조합을 통해 제한된 수의 분류 가능한 동작 수를 활용하여 다양한 작업을 가능하게 할 수 있다는 것을 확인 할 수 있다.
|




- 의수 제어 방법
- 근전도 센서
- 의수 하드웨어
- 최적근전도신호센서개수
- 동작시너지제어




전체댓글 0
(0).jpg)




.jpg)













