


| 레이저(laser)는 Light Amplification by Stimulated Emission of Radiation의 약자로 산업 분야나 과학 분야에서 많이 사용되고 있는 광학장비이다. 사전적 의미로 빛의 유도방출과 밀도방출을 사용하여 고출력의 단일 파장으로 일정하게 나아가는 빛을 레이저라 한다. 레이저의 특징은 단색성(monochromatic), 방향성, 결맺음을 가진다[1]. 태양광을 프리즘으로 스펙트럼을 만들게 되면 다양한 색이 나온다. 하지만 레이저는 특정 주파수 대역을 가지는 단일 파장의 빛을 만들 수 있으며, 이를 단색성이라 한다. 일반적으로 빛(태양광, 형광등 등)은 광원에서부터 퍼지게 되며 거리의 제곱에 반비례해서 에너지는 감소하게 된다. 하지만 레이저 거울과 공명기 내에서 정렬된 빛의 왕복 운동을 통해 발진하는 레이저는 방향성을 가지게 된다. 물론 완벽한 직선광은 아니며 약간의 퍼짐이 존재하는데 이는 빛의 회절(diffraction) 특성 때문에 기인한다. 마지막 레이저의 특징은 결맺음이다. 결맺음이란 레이저 빛이 같은 위상을 가지고 있다는 것을 의미한다. 레이저의 방향성과 단색성으로 인해 레이저는 멀리 전달되거나 한 점에 초점을 맺을 수 있으며, 결맺음으로 인해 레이저가 특정 원자(또는 입자)와 반응하여 특정 위상(파장)을 방출하기에 원자 구조 등을 알아낼 수 있다. 유체 유동을 가시화하는 방법으로 가장 오래된 방법이 사진을 찍는 것이다. 제논 램프나 단일 백색광을 내는 조명을 사용하여 밀도 구배가 존재하는 유동을 찍는 것이다. 한여름 달궈진 길 위로 아지랑이가 눈에 보이는 것처럼 온도차이에 의해 유체에 밀도 구배가 발생한다. 초음속 유동의 경우에도 압축성 효과에 의한 밀도 구배가 발생하며, 이런 밀도 구배가 존재하는 유체를 지나는 빛은 음영차이를 발생하고 이런 음영차이를 가시화 하는 것을 쉐도우 그래픽(shadow graph) 방법이라고 한다. 쉐도우 그래픽 방법에 슬릿(slit)을 설치하여 밀도 구배를 더 확연하게 나타내는 방법이 슐리렌(schlieren) 방법이다. 앞서 설명한 빛의 회절효과에 의해 빛이 슬릿을 지나면서 빛의 파장(위상)의 가감을 통해 밀도 구배 이미지를 더 선명하게 측정할 수 있다. 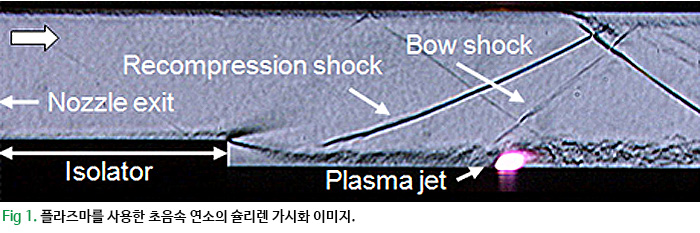
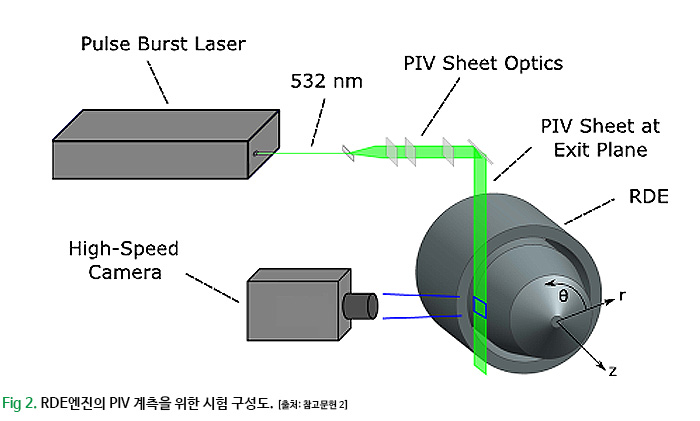
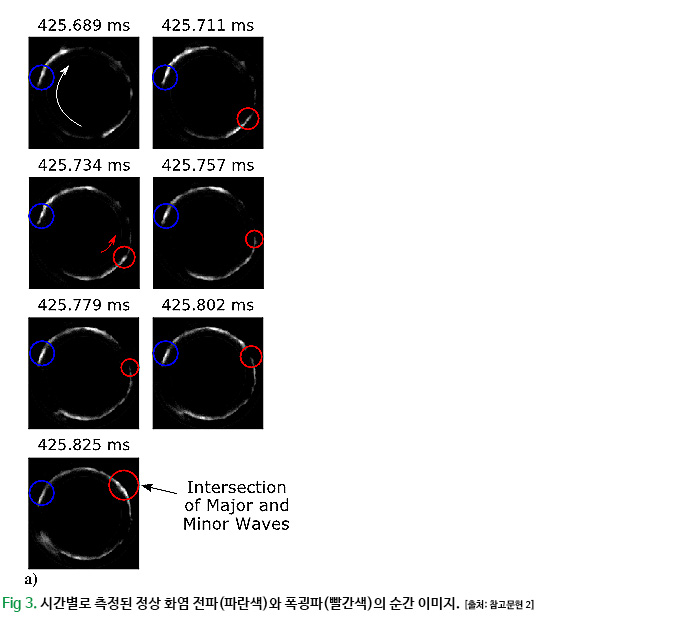
Fig 1은 필자가 예전에 플라즈마 점화기를 사용한 초음속 수소 연소 시험을 슐리렌 기법으로 가시화 한 이미지다. 일반 사진을 찍게 되면 수소 연소이기에 화염은 안보이며 밝은 플라즈마 빛만 보이지만 슐리렌 기법을 사용하게 되면 충격파(shock)와 경계층(boundary layer) 등의 유체 유동을 가시화할 수 있다. 하지만 이와 같은 고전적인 가시화 기법은 유동의 정성적인 특징을 알 수 있지만 정량적인 부분을 측정하기에는 어려움이 있다. 시험에 사용된 레이저의 듀얼 펄스의 지속시간은 8~13 ns이다. 산란광(Mie scattering)을 얻기 위해 사용된 입자는 일반적으로 연소시험에 자주 사용되는 Zirconia(Zro2)를 사용하였다. 입자는 200nm지름으로 균일하다. 입자에서 산란되는 Mie 산란 신호는 고속 CMOS 카메라를 사용하며 고속카메라로 유명한 회사인 Phantom V2512모델을 사용하였다. 이미지는 200 kHz로 노출시간은 4.23 μs이다. 레이저 면에서 측정되는 이미지에 대해 공간교정을 하며 공간분해도(spatial resolution)의 경우 138.36 μm/pixel이다. RDE 엔진은 노즐에서 순간적인 폭발에 의한 폭굉이라는 화염이 분사되면서 출력을 형성하는 엔진이다. 이 경우 유동의 흐름이 일정하지 않은 편이다. RDE 출구에서의 순간적으로 촬영된 이미지[Fig 3]를 보게 되면 시계방향으로 회전하는 정상화염(파란색)과 반시계 방향으로 회전하는 폭굉파(빨간색)을 볼 수 있다.
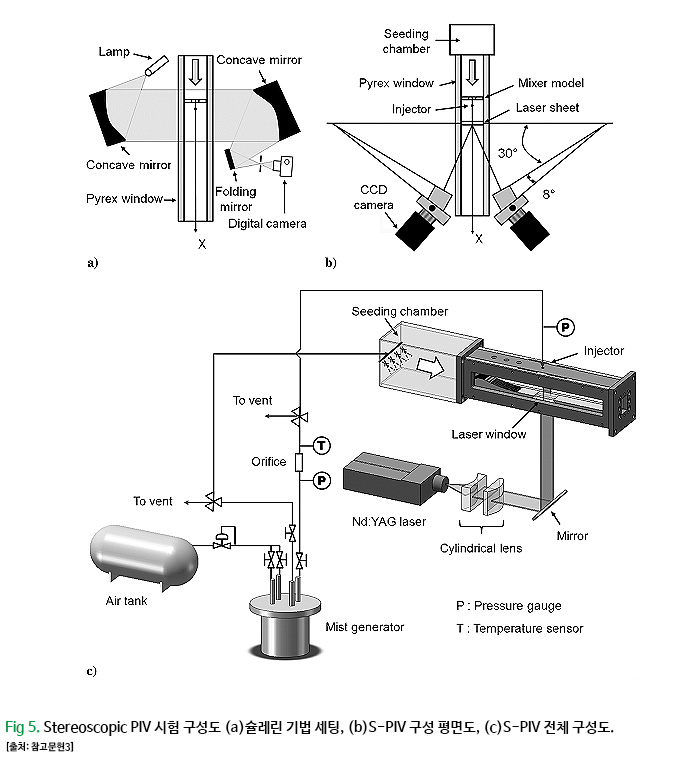
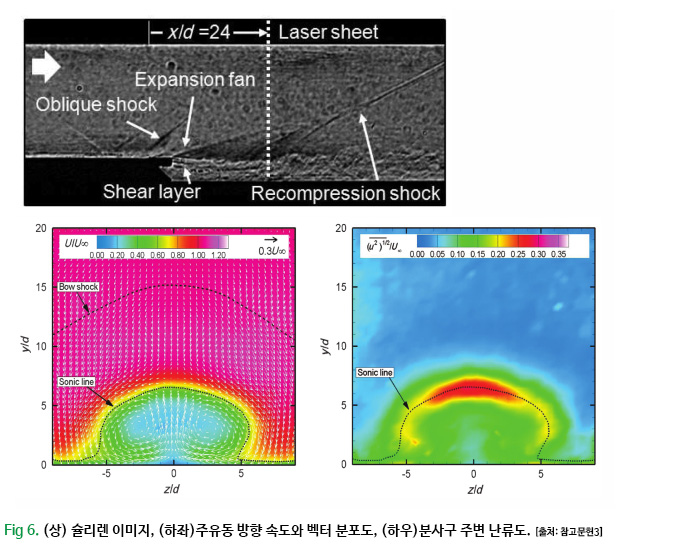
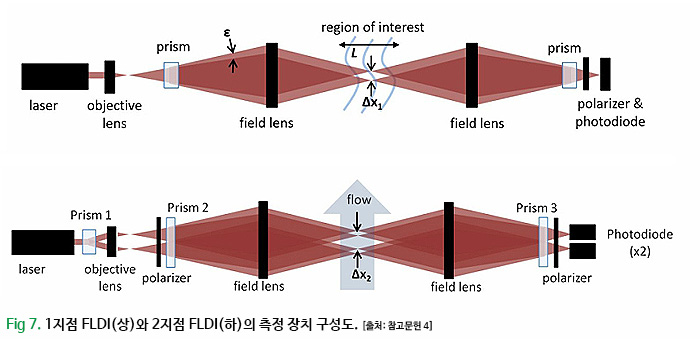
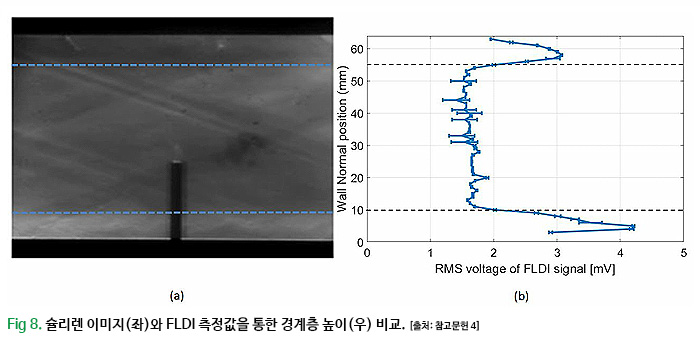
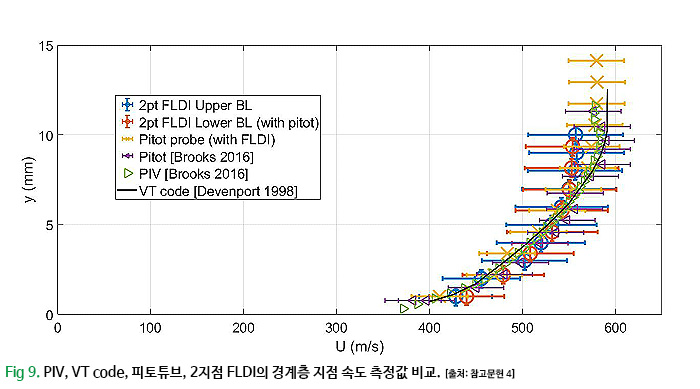
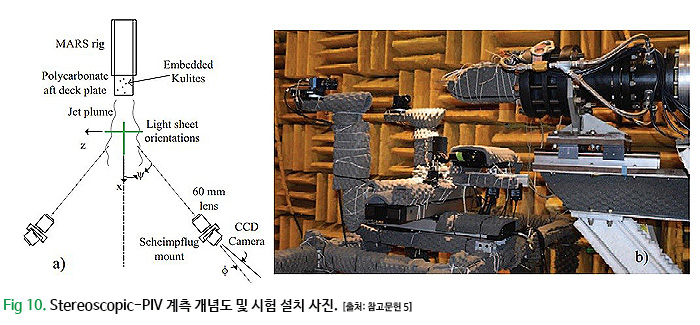
앞서 소개한 PIV 기법은 2차원 평면에 대한 계측 기법이며, 필자는 3차원 PIV기법을 사용하여 마하 2의 초음속 유동에서 수직 분사를 했을 경우의 혼합 특성을 계측한 바가 있다. Stereoscopic PIV는 Fig 5와 같이 사람이 두 눈으로 3차원 사물을 보는 것과 같은 원리로 2대의 카메라가 구성되어 있다[3]. 이중 펄스 Nd:YAG 레이저(파장 532 nm, 펄스간격 5-7ns)를 사용하였으며, 레이저 면의 두께는 1.5mm, 폭은 50 mm이다. Fig 6에서 레이저 면에서 측정된 속도 영역과 속도 벡터를 볼 수 있다. 측정 지점은 Fig 6a)의 슐리렌 이미지에서처럼 유동이 팽창하는 영역으로 속도 벡터들이 바닥면에서는 아래 방향으로 상부 지점에서는 위 방향을 향하며 분사구에서 분사를 하여 형성된 재순환 영역에서는 한 쌍의 대칭 와류(counter-rotating vortex)가 형성이 된다. 대칭 와류는 속도가 다른 두 유동의 간섭으로 재순환 영역 내부에서 유동이 밖으로 나가지 못하고 중심부를 토대로 서로 회전하는 유동이다. 초록색의 재순환 영역에서 속도벡터가 z/d=0지점에서 위로 향했다가 경계면(sonic line)을 따라 좌우로 이동했다가 바닥면에서 다시 중심으로 이동하는 것을 볼 수 있다. Fig 6c의 난류분포는 유체 흐름의 불안정도를 나타낸다. PIV를 측정된 평균된 주유동값에 대해 분산되는 값을 RMS(root mean square)으로 계산하면 얻을 수 있다. 해당 시험에서는 재순환 영역의 상부와 초음속 유동이 직접적으로 간섭을 일으키는 부분(빨간색)에서 난류가 강하게 존재하는 것을 볼 수 있다. 난류가 강하게 나타난다는 것은 이 부분에서 두 종류의 유동 사이에서 물질과 에너지 교환이 활발하게 일어난다는 것을 의미한다. Fig 7에서처럼 한 지점 초점을 가지는 FLDI의 구성은 레이저에서 발진된 빔은 대물렌즈(objective lens)를 통해 초점에 모였다가 확산이 된다. 이중 굴절 프리즘(birefringent prism)을 지나 수직한 2개의 편광 빔은 작은 각도를 가지면서 분리가 된다. 시야렌즈(field lens)를 통해 측정 영역에서 일정한 간격을 두고 2 개의 초점이 맺히며 다시 시야렌즈를 통해 이중 굴절 프리즘을 지나서 편광판(polarizer)과 포토다이오드(photodiode)에 측정이 된다. 위상차(phase difference)는 포토다이오드의 출력 볼트에 비례한다. 위상차는 측정지점의 단위 간격(x1)에 대한 밀도 구배의 영향을 받게 된다. 2지점 초점 FLDI는 레이저와 대물렌즈 사이에 프리즘을 추가하여 2개의 빔으로 분리하여 편광판과 이중 굴절 프리즘을 통해 4개의 초점이 맺히도록 한다. 측정되는 부위에는 포토다이오드가 2개가 설치된다. Fig 8에서처럼 슐리렌과 FLDI로 측정한 전압 측정값을 비교해보면 주유동 영역에서는 전압이 일정하며 경계층에서 신호값이 전이되는 것을 볼 수 있다. 신호가 전이되는 지점의 높이와 슐리렌 이미지 상에서의 경계층을 비교하면 경계층 높이가 일치하는 것을 볼 수 있다. 또한 Fig 9에서 경계층 내외부의 속도를 피토 튜브(pitot tube), PIV, VT code 등 기존의 속도 측정 기법들과 비교했을 경우, 난류 경계층의 외부면에서 오차가 있긴 하지만 대부분 속도 분포가 일치하는 것을 볼 수 있다.
고속 유체 유동 관련 레이저 계측에 대해 최신 논문 리뷰를 해보았습니다. 필자가 약 10년전에 stereoscopic PIV 기법을 사용하여 초음속 유동을 측정하였으며, 그 당시에도 해당 기법은 소수의 연구소에서 하던 최신 가시화 기법이었습니다. |
- 초음속 유동
- 레이저 계측 기법
- 고속 유체 유동
- 광학 정렬
- 초음속 유동 계측





(0).jpg)




.jpg)













