


정병규(기계·로봇 연구정보센터)
2020-11-20
 ICRA 2020 논문을 통해 본 로봇분야 연구동향_1120(0).pdf
ICRA 2020 논문을 통해 본 로봇분야 연구동향_1120(0).pdf 이석(부산대학교 기계공학부 교수), 정병규(기계·로봇 연구정보센터)
이석(부산대학교 기계공학부 교수), 정병규(기계·로봇 연구정보센터)
COVID-19로 인해 ICRA(IEEE International Conference on Robotics and Automation) 2020은 대략 1주일 동안 offline conference로 진행되었던 형식에서 벗어나, 5월 말부터 8월 말까지 3개월간 virtual conference로 진행되었다. Keynotes와 Workshop & Tutorial은 실시간으로 진행했지만, Main sessions는 녹화되어 3개월 동안 언제든 다시 볼수 있도록 하였다. 또한 Main sessions의 질의응답은 개별 채널을 개설하여 저자와 별도로 소통할 수 있게끔 구성하였다. 무엇보다 큰 차이점은 등록비를 아주 저렴하게 Non-member 기준 150유로 (Non-member student는 25유로)로 책정한 것이다. 전통적인 학술대회에 비해서 시간/비용적으로 훨씬 경제적이어서 접근성이 향상된 면이 있었다.
(참조: https://www.materic.or.kr/community/board/content.asp?idx=173446&page=1&s_kinds=&s_word=&board_idx=1031)
Figure 1. ICRA 2020 웹사이트 (http://www.icra2020.org)

자료 분석을 위해 ICRA의 2020년 학술대회 논문 중 IEEE Xplore digital library (https://ieeexplore.ieee.org/xpl/conhome/9187508/proceeding)에 공개된 1,073편 논문에 대한 저자 및 소속, 키워드 등을 추출하여 정리하였다. 분석방법은 통계 분석과 네트워크 분석을 사용하였는데 통계분석에서는 기관별 논문 발표 순위, 국가별 논문 발표 순위, 국가별 참여기관 수, 한국 기관의 논문 발표 순위를 분석하였고, 네트워크 분석에는 NetMiner 3.6을 사용하여 키워드 분석, 연구자 분석, 기관-키워드 분석(2Mode)을 하였다.

1. ICRA 2020 국가별 논문 발표 순위
이번 ICRA 2020에서는 총 42개 국가에서 1,073편의 논문이 발표되었으며, 국가별 논문 발표 순위를 살펴보면 아래 Figure 2와 Table 1과 같이 미국이 386편으로 가장 많은 논문을 발표하였으며, 그 뒤로 중국이 113편, 독일이 95편, 영국이 60편, 일본이 5편, 우리나라가 49편의 논문을 발표하였다.
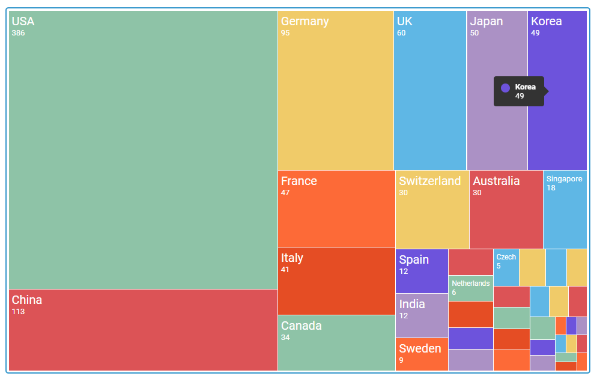
Figure 2. ICRA 2020 국가별 논문발표 순위
Table 1. ICRA 2020 국가별 논문발표순위
2. ICRA 2020 기관별 논문 발표 순위
ICRA 2020에서는 약410여 기관에서 논문을 발표하였으며,기관별 발표 논문 수는 Figure 3과 Table 2와 같이 MIT가 32편, Georgia Inst. of Technol.이 23편, Carnegie Mellon Univ.가 22편, Stanford Univ.가 21편, Univ. of Pennsylvania가 20편, Univ. of California at Berkeley가 19편, KAIST는 18편, Chinese Univ. of Hong Kong과 Imperial College London이 각각 16편의 논문을 발표하였다.또한 Univ. of Oxford는 14편, Tech. Univ. Munich는 13편, California Inst. of Technol.는 12편, Italian Inst. of Technol. (IIT)와 Seoul Nat. Univ., Univ. of Tokyo는 각각 11편의 논문을 발표하였다.
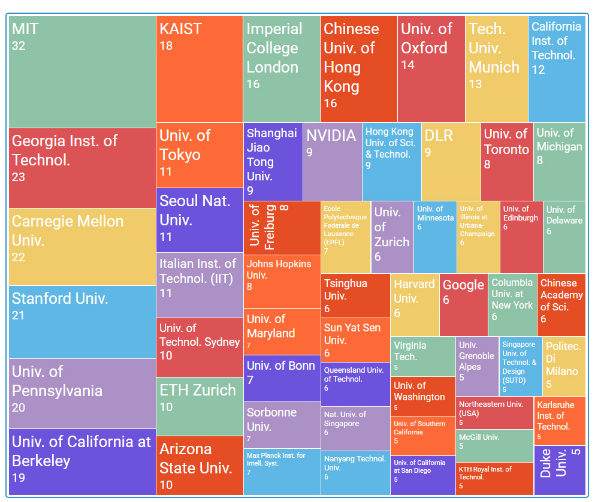
Figure 3. ICRA 2020 기관별 논문 발표 수(5편 이상)
Table 2. ICRA 2020 기관별 논문 발표 수(5편 이상)

1. 키워드 네트워크 분석
논문의 키워드를 분석하면 발표된 논문들이 어떠한 분야와 주제의 연구인지 확인할 수 있다. Figure 4에 보인 키워드 Spring layout 네트워크는 각 논문의 키워드를 분석하여 취합하고 한 논문에 같이 나열된 키워드들을 서로 연결하여 그림으로 나타낸 것으로, 전체 키워드의 상관관계를 좀 더 보기 쉽게 빈도수 5 이하인 값을 삭제한(Link Reduction 5) 그림이다.
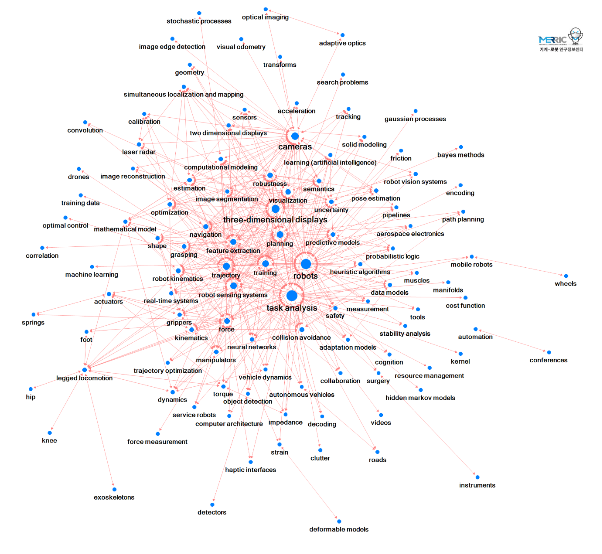
Figure4. ICRA 2020키워드 네트워크 (Spring Layout, Link Reduction 5)
ICRA학회에서는 보통 Mobile Robots를 중심으로 Robot Vision, Path Planning, Motion Control의 3가지 키워드의 빈도수가 높게 나타났는데 이번 2020년에는 위의 Figure 4와 같이 Task Analysis라는 키워드가 제일 비중이 높은 키워드로 나타났다. 이외에도 Robots, Three-dimensional Displays, Cameras, Robot Sensing Systems가 중요 키워드로 나타났다.
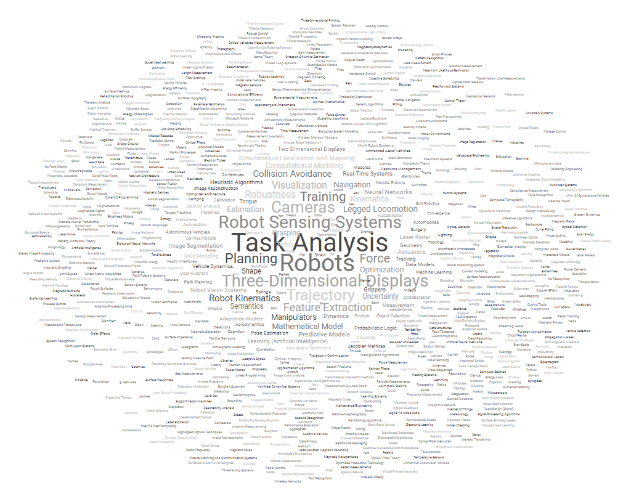
Figure 5. ICRA 2020 키워드 태그 클라우드
Figure 5는 키워드의 연결 관계와 상관없이 빈도수의 비중을 계산하여 태그 클라우드(Tag cloud)로 표현한 그림이다.ICRA 2020의 논문의 총 키워드 수는 890개이며, 가장 많이 사용된 빈도수 20 이상의 키워드를 Table 3과 같이 정리하였다. 이를 살펴보면 Task Analysis, Robots, Robot Sensing Systems, Three-Dimensional Displays, Cameras, Trajectory, Planning, Training, Force, Feature Extraction이 100회 이상 나왔으며 Visualization, Robustness, Robot Kinematics, Collision Avoidance, Legged Locomotion, Optimization, Estimation, Kinematics, Manipulators, Mathematical Model, Navigation, Uncertainty, Grasping, Computational Modeling, Shape, Semantics, Predictive Models이 빈도수 50회 이상으로 나타났다.
Table 3. ICRA 2020 논문의 키워드 빈도수(빈도수 20 이상)
Degree Centrality는 연결 정도 중심성으로 한 개인이 전체 네트워크에서 얼마만큼 중심에 가까이 자리 잡고 있는지를 나타내는 지표다. 네트워크 분석에서 개인이 가지는 영향력을 분석하는 데 가장 많이 쓰인다. 여러 논문과 다른 연구자와의 연결 관계가 많을수록 네트워크 가운데 쪽으로 위치하게 된다.ICRA 2020의 키워드들의 Degree Centrality의 결과는 Figure 6과 같다.
위의 결과들과 마찬가지로 Task Analysis와 Robots를 중심으로 Three-Dimensional Displays, Cameras, Trajectory, Robot Sensing Systems, Force, Training, Planning, Feature Extraction 등의 키워드가 중심에 가까이 나타났다.
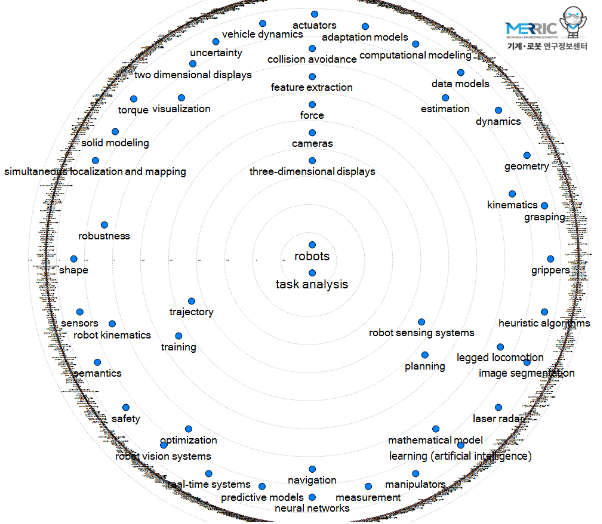
Figure 6. ICRA 2020키워드 Degree Centrality
2. 공저자 네트워크 분석
키워드 분석과 마찬가지로 ICRA 2020의 논문 공저자들의 상관관계를 NetMiner를 사용하여 시각화(Spring layout)하였다. Figure 7과같이 많은 연구자 그룹이 형성되어 있는 것을 확인할 수 있으며, 이중 오른쪽 아래는 개인이나 실험실 단위의 소규모 연구 그룹을 나타내고 있으며, 왼쪽 위로 갈수록 여러 기관 소속의 연구자들이 모인 그룹이다.
Figure 7. ICRA 2020 공저자 네트워크 (Spring Layout)
이 중 몇 개의 큰 그룹을 확대하여 살펴보기로 하자. 가장 큰 연구자 그룹은 Figure 8과 같이 NVIDIA의 연구그룹을 중심으로 Univ. of California at Berkeley와 Stanford Univ. 그리고 Shanghai Jiao tong Univ.그룹이 연결되어 있다. 이 그룹에서는 Dieter Fox(NVIDIA)가 가장 높은 비중을 차지하는 중심연구자로 뚜렷하게 구별이 가능하다.
Dieter Fox는 NVIDIA의 로봇 연구 수석이사이며, 인공 지능, 컴퓨터 비전 및 머신 러닝을 연구하고 있는 로봇공학자이다. 또한 시애틀의 워싱턴 대학교 (University of Washington)의 컴퓨터 공학부 교수이다. 독일 본 대학교에서 그는 200편 이상의 기술 논문을 발표했으며 "Probabilistic Robotics"라는 책을 Wolfram Burgard와 Sebastian Thrun과 함께공동으로 집필하였다.또한 IEEE 및 AAAI( Association for the Advancement of Artificial Intelligence)의 펠로우이며, 로봇 공학, AI 및 컴퓨터 비전 컨퍼런스에서 여러 우수 논문상을 수상하였다.
현재 ‘코봇(Cobot)’이라 불리는 사람과 같은 공간에서 작업하면서 물리적으로 상호작용 할 수 있는 Interactive Manipulation 로봇을 연구 중이다. (https://blogs.nvidia.co.kr/2019/01/15/nvidia-seattle-ai-robotics-research-lab)
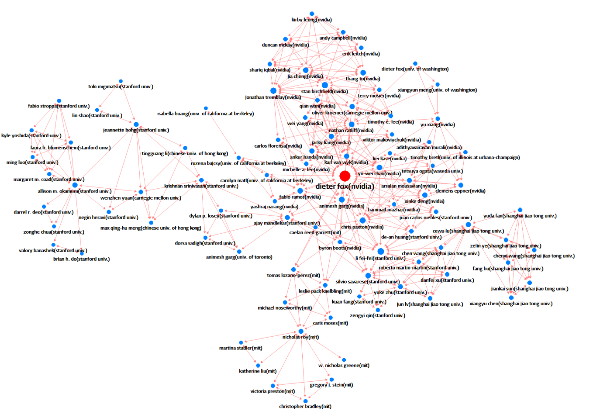
Figure 8. NVIDIA, Univ. of California at Berkeley, Stanford Univ., Shanghai Jiao tong Univ. 그룹
다음으로 큰 그룹은 Figure 9와같다.이 그룹은 Chinese Univ. of Hong Kong, Shanghai Tech Univ., ETRI(한국전자통신연구원), Australian Nat. Univ., Carnegie Mellon Univ., KAIST, GIST, Shandong Univ., Shanghai Jiao Tong Univ. 등 매우 많은 기관의 연구자들로 구성되어 있으며,크게 부각되는 중심연구자가 존재하지 않으나, 이 중 Yun-hui Liu(Chinese Univ. of Hong Kong)이 그나마 높은 비중을 가진 연구자로 나타났다.
Yun-hui Liu 교수는 Chinese Univ. of Hong Kong(CUHK)의 기계 및 자동화 공학과의 교수이며, Harbin Institute of Technology의 객원 교수이다.또한 CUHK T Stone Robotics Institute와CUHK 및 NUDT(National University of Defense Technology)의 지능형 감지 및 시스템 공동 센터의 이사이다.연구 분야는 비전 기반 로봇 공학, 의료 로봇 공학, 서비스 로봇 및 기계 지능 등이며, 의료 로봇 공학에서 외과의의 지원 작업을 하거나 수술을 자동화 할 수있는 수술 로봇 개발에 초점을 맞추고 있다.부비동 수술과 자궁 적출을 위해 개발한 수술 보조 로봇은 Prince of Wales 병원에서 임상 시험을 완료하였다고 한다.(http://ri.cuhk.edu.hk/yhliu)
또한, 이 그룹에 Hae-gon Jeon(GIST), Sunghoon Im(DGIST), Jean Oh(Carnegie Mellon Univ.)와 Byeong-uk Lee(KAIST), Kyunghyun Lee(KAIST), InSo Kweon(KAIST), Kyungdon Joo(Carnegie Mellon), Tae-huun Oh(POSTECH) 등 여러 한국인 연구자들이 포함되어 있다.
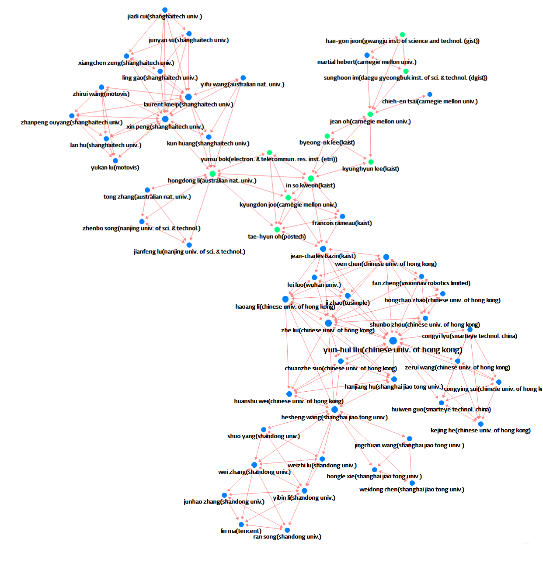
Figure 9. Chinese Univ. of Hong Kong, Shanghai Tech Univ., ETRI, Australian Nat. Univ., Carnegie Mellon Univ., KAIST, GIST, Shandong Univ., Shanghai Jiao Tong Univ.그룹
세번째로 큰 그룹은 Figure10과 같이 Georgia Inst. of Technol. 연구자와 Stanford Univ., 그리고 DLR의 연구자들이 연결된 그룹이며, 이 그룹에서는 Magnus Egerstedt(Georgia Inst. of Technol.)의 비중이 큰 편이다. Magnus Egerstedt는 스웨덴계 미국인 로봇 공학자로 조지아 공과 대학 전기 및 컴퓨터 공학부 교수이다. Magnus Egerstedt 는 Theory of hybrid and discrete event systems와 Control of multi-agent systems 연구에 많은 기여를 하고 있다.
(https://en.wikipedia.org/wiki/Magnus_Egerstedt)
이 그룹에도 Jee-hwan Ryu(KAIST), Dongheui Lee(Tech. Univ. Munich), Jongseok Lee(DLR), Minjun Kim(DLR), Chanil Lee(KAIST), Do-hyeong Kim(KAIST), Hyeon-seok Seong(KAIST) 등 한국인 연구자들이 많이 연결된 것을 볼수 있다.(한국인은 초록색으로 표기)
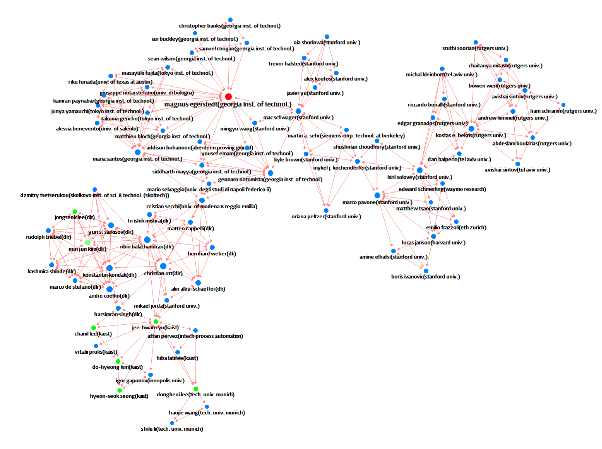
Figure 10. Georgia Inst. of Technol., Stanford Univ., DLR, KAIST 연결 그룹
Figure 11은 California Inst. of Technol. 와 Univ. of Zurich, Intuitive Surgical Inc.가 연결된 그룹이다. 이 그룹에서는 California Inst. of Technol. 의 Aaron D. Ames와 Joel W. Burdick이중심적인 역할을 하는 것으로 보인다.
Aaron D. Ames는 2017년부터 California Inst. of Technol.에서 기계 및 토목 공학 및 제어 및 역학 시스템의 교수로 재직 중이다. 그는 이족 보행 로봇 연구에 기여한 공로로 2015년 Donald P. Eckman Award를 수상하였으며, "Safety-Critical Autonomy in Robotic Locomotion"이라는 제목의 연구 프로젝트로 2017 Okawa Foundation Research Grant를 수상하였다. ( https://en.wikipedia.org/wiki/Aaron_D._Ames )또한 Joel W. Burdick은 Robotics, Kinematics, Mechanical Systems and Control을 연구하고 있다. ( https://eas.caltech.edu/people/jburdick )
이 그룹에는 한국인으로 유일하게 Soon-Jo Chung(California Inst. of Technol.) 교수가 포함되어 있다.
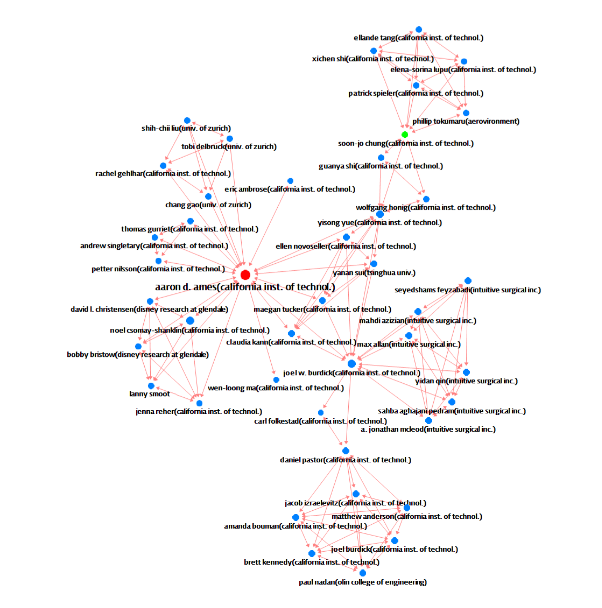
Figure 11. California Inst. of Technol. 와 Univ. of Zurich, Intuitive Surgical Inc. 연결 그룹
Figure 12에서 보이는 연구 그룹은 Univ. of California at San Diego, Univ. of Pennsylvania, US Army Res. Lab. 등이 연결된 그룹으로 이 그룹에서는 Vijay Kumar (Univ. of Pennsylvania)가 중심연구자이다. Vijay Kumar는 펜실베이니아 대학교의 컴퓨터 및 정보 과학과 전기 및 시스템 교수로 2015년부터 Univ. of Pennsylvania의 학장을 맡고 있다. Vijay Kumar는 멀티로봇의 제어와 조정에 관한 연구로 유명하다. 자율 지상 및 공중 로봇 개발, 집단행동 및 로봇 무리에 대한 생물학적 알고리즘 설계에 대한 획기적인 작업으로 전 세계적으로 인정 받고 있다.(https://en.wikipedia.org/wiki/Vijay_Kumar_(roboticist))
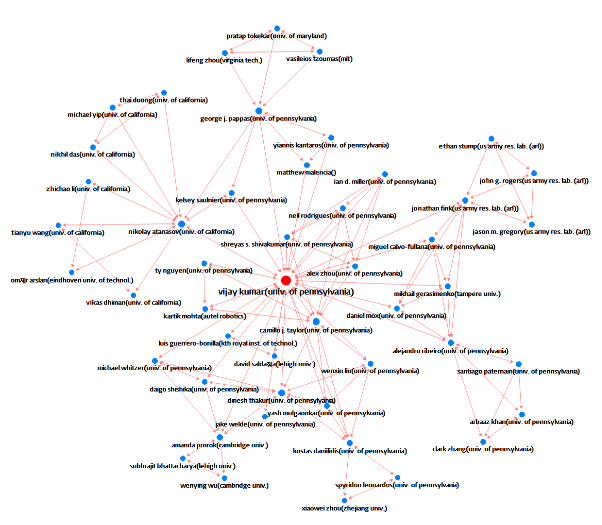
Figure 12. Univ. of California at San Diego, Univ. of Pennsylvania, Us Army Res. Lab.연구 그룹
Figure 13은 Tsinghua Univ., Intel Labs China, City Univ. of Hong Kong, Imperial College London 등의 기관이 연결된 그룹이다. 이 그룹에는 각 연구그룹을 이어주는 연구자들이 많이 있다. Fei Qiao(Tsinghua Univ.)와 Xuesong Shi(Intel Labs China)는 각각 Tsinghua Univ.와 Intel Labs China의 중국 연구자들을 연결하는 역할을 하고 있으며, Yao Guo(Imperial College London)는 Intel Labs China그룹과 Imperial College London 그룹을 연결하는 역할을 하고 있다. Guang-Zhong Yang(Imperial College London)은 또다른 Imperial College London 그룹과 연결 하는 역할을 하고 있다.
이 그룹에서는 Yang Guang-Zhong의 비중이 가장 높은데, 그는 Imperial College London의 로봇 수술을위한 Hamlyn 센터의 공동 창립자이자 소장이며, UK-RAS 네트워크의 회장이기도 하다. 연구 관심 분야는 의료 영상, 감지 및 로봇 공학이다. (http://imr.sjtu.edu.cn/en/ab_lead/210.html)
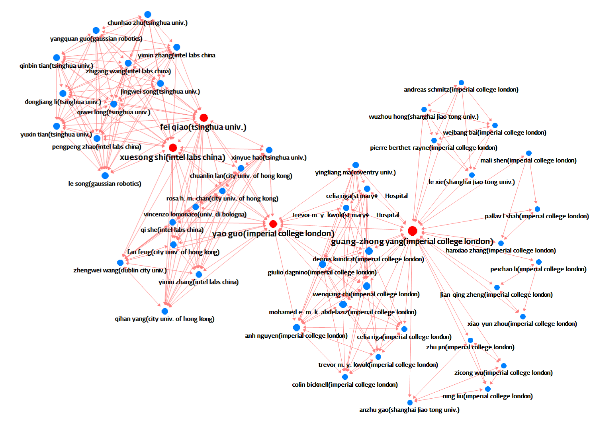
Figure 13. Intel Labs China, City Univ. of Hong Kong, Imperial College London 연결 그룹
Figure 14는 Univ. of Houston, Univ. of South Carolina, Texas A&M Univ., Tech. Univ. Braunschweig 연구자들이 연결된 그룹이다. 이 그룹에서는 Aaron T. Becker(Univ. of Houston)가 가장 중심연구자이면서 여러그룹을 연결하는 역할을 하고 있다.
Aaron T. Becker는 Univ. of Houston의 전기 및 컴퓨터 공학 조교수로서 Robotics Lab.을 운영하고 있으며,자기장으로 Micro-Scale의 군집 로봇을 조종하고, 드론을 이용한 여러 실험들을 진행하고 있다.
( https://uh.edu/housing/about/fir/Dr.%20Aaron%20Becker%20/ )
또한 현재 유튜브에서 본인의 여러 연구를 소개하고 있다.( https://www.youtube.com/user/aabecker5 )
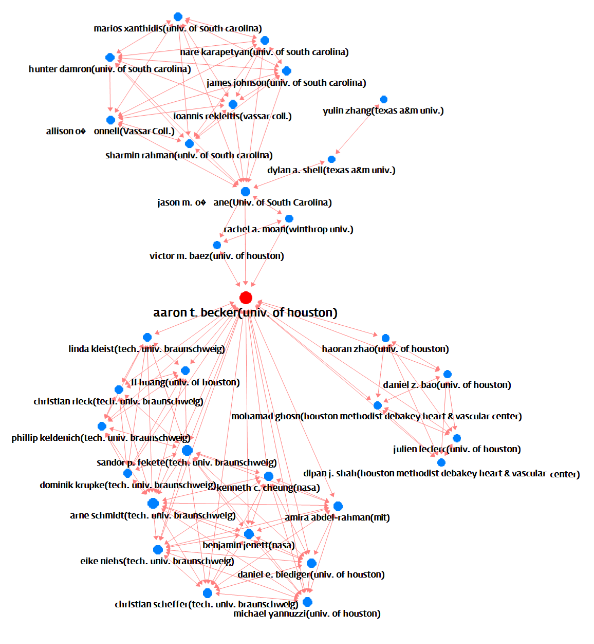
Figure 14.Univ. of Houston, Univ. of South Carolina, Texas A&M Univ,. Tech. Univ. Braunschweig 연결 그룹
Toyota Research Inst. 와 UC Berkeley, Tech. Univ. Munich, University of North Carolina at Chapel Hill의 연구자들이 모여서 형성된 그룹을 Figure 15가 보여주고 있는데,이 그룹에서는 UC Berkeley의 Ken Goldberg가 중심 연구자로 나타났다.
Ken Goldberg는 로봇 공학 및 자동화 분야의 예술가, 작가, 발명가 및 연구원으로 UC Berkeley Automation Sciences Lab.을 운영하고 있다.그는 1984년에 웹 인터페이스를 갖춘 최초의 로봇을 개발하기도 하였다.( https://en.wikipedia.org/wiki/Ken_Goldberg )
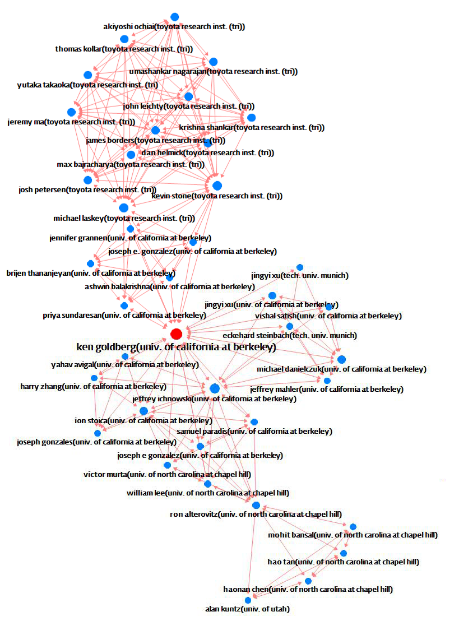
Figure 15. Toyota Research Inst., UC Berkeley, Tech. Univ. Munich., Univ. of North Carolina at Chapel Hill
Figure 16은 Idiap Research Institute., LAAS(Laboratory for Analysis and Architecture of Systems), CNRS(Centre national de la recherche scientifique), Max Planck Inst. for Intell. Syst., ETH Zurich, New York Univ., Univ. of Edinburgh., Tsinghua Univ.의 연구자들이 모인 그룹으로 Ludovic Righetti(New York Univ.)와 Maximilien Naveau(Max Planck Inst. for Intell. Syst.)가 여러 그룹을 연결하는 역할을 하고 있다.
Ludovic Righetti는 New York Univ.의 전기 및 컴퓨터 공학과, 기계 및 항공우주 공학과의 부교수이며 Max Planck Institute for Intelligent Systems (MPI-IS)의 선임 연구원이다.그는 자율 로봇의 움직임을 계획하고 제어하는 연구를 하고 있으며, Machines in Motion Lab.을 운영하고 있다.(https://engineering.nyu.edu/faculty/ludovic-righetti)Maximilien Naveau는 Max Planck Inst.의 박사 후 연구원으로 팔다리를 가진 로봇의 궤적 최적화와 운동에 관한 연구를 하고 있다.(https://www.is.mpg.de/person/mnaveau)
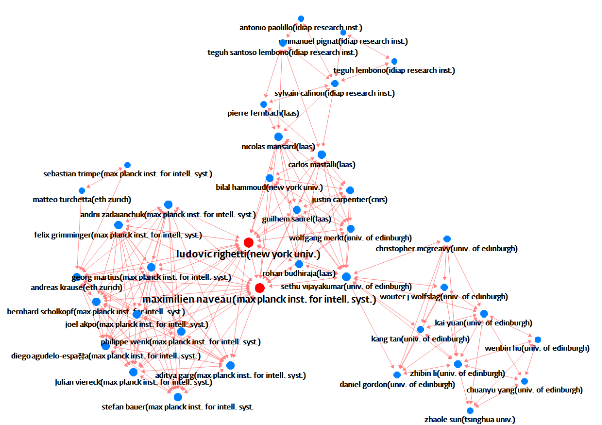
Figure 16. Idiap Research Inst., LAAS, CNRS, Max Planck Inst. for Intell. Syst., ETH Zurich, New York Univ., Univ. of Edinburgh., Tsinghua Univ. 연결 그룹
공저자 데이터를 바탕으로 하여 Figure 17과 같이 연구자의 Degree Centrality를 분석하였다. Degree Centrality는 연결 정도 중심성으로 한 개인이 전체 네트워크에서 얼마만큼 중심에 가까이 자리 잡고 있는지를 나타내는 지표다. 네트워크 분석에서 개인이 가지는 영향력을 분석하는 데 가장 많이 쓰인다. 여러 논문과 다른 연구자와의 연결 관계가 많을수록 네트워크 가운데 쪽으로 위치하게 된다.아래 ICRA 2020 공저자 네트워크 시각화를 살펴보면 Dieter Fox(NVIDIA)가 가장 중심에 있으며, 두 번째 중심에 가까운 연구자로 Guang-zhong Yang(Imperial College London), Ken Goldberg(Univ. of California at Berkeley), Roland Siegwart(ETH Zurich), Vijay Kumar(Univ. of Pennsylvania)가 있으며, 중심에서 세번째로 가까운 원에는 Aaron T. Becker(Univ. of Houston), Iulian Iordachita(Johns Hopkins Univ.), Kei Okada(Univ. of Tokyo), Li Fei-Fei(Stanford Univ.), Masayuki Inaba(Univ. of Tokyo)가 있음을 확인할 수 있다.
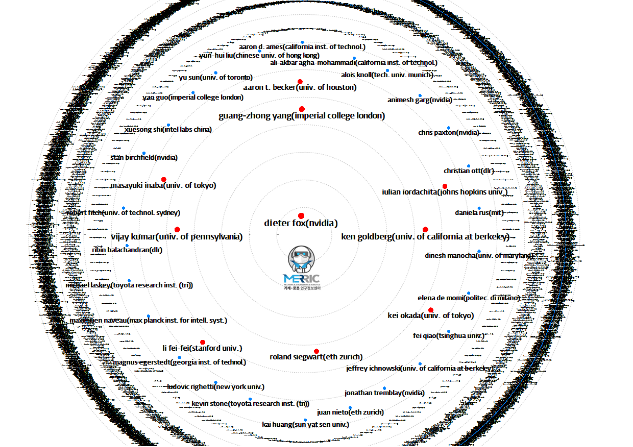
Figure 17. ICRA 2020 공저자 Degree Centrality
Degree Centrality는 공저 논문의 수뿐 아니라 연결된 공저자수에 따라서도 위치를 달리하게 된다. 실제로 Table 4와 같이 공저 논문이 4편인Aaron T. Becker(Univ. of Houston), Iulian Iordachita(Johns Hopkins Univ.),Li Fei-Fei(Stanford Univ.)는 중심에 가까이 나타난 반면,Aaron D. Ames(California Inst. of Technol.),Daniela Rus(MIT), Magnus Egerstedt(Georgia Inst. of Technol.)는 공저 논문 수가 6편인데 가까운 중심에 나타나지 않고 있다.
Table 4. ICRA 2020 공저 논문 수 순위 (5편 이상)
3. 한국 기관 소속 연구자 네트워크 분석
이번 ICRA 2020에서 17개의 한국기관에서는 총 49편의 논문을 발표하였다.Table5와 같이 KAIST가 18편,Seoul Nat. Univ.가 11편, KIST가 4편, UNIST와 Univ. of Sci. and Technol. (UST)가 각각 2편의 논문을 발표하였다.이외에도 Chonbuk Nat. Univ., Chonnam Nat. Univ., Ewha WomansUniv., GIST, Hanyang Univ., Hyundai Heavy Ind. Co., Korea Inst. of Robot & Convergence (KIRO), Korea Univ., NAVER, Samsung Electronics Co., Sejong Univ., Yeungnam Univ.에서 각각 1편의 논문을 발표하였다.
Table 5. ICRA 2020 한국 기관의 논문 발표 수
한국 기관의 연구자만 별도로 추출하여 연결한 연구 그룹들은 Figure 18과 같다.
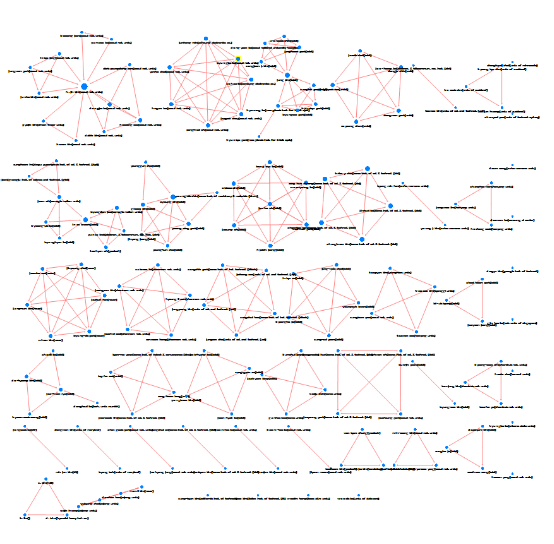
Figure 18. ICRA 2020 한국인 공저자 네트워크 (Spring Layout.)
대부분 한국의 연구 그룹은 대학별로 분리된 것을 볼 수 있다. 위의 연결 관계를 기초로 중심도를 분석하면 Figure 19와 같다. 중심에 가까운 연구자는 H. Jin Kim(Seoul Nat. Univ.)이며,그 다음으로 Ayoung Kim(KAIST), Brian Y. Cho(KIST), Changhwan Kim(KIST), Changjoo Nam(KIST), In So Kweon(KAIST), Jinhwi Lee(KIST), Jung Kim(KAIST), Sanghun Cheong(KIST)로 나타났다.
김현진(H. Jin Kim) 교수는 현재 서울대학교 기계항공공학부에서 근무 중이며 로봇공학, 인공지능 및 응용 제어 등의 분야에 대한 연구를 진행 중이다. (http://robotics.snu.ac.kr/html/sub01_02.php)
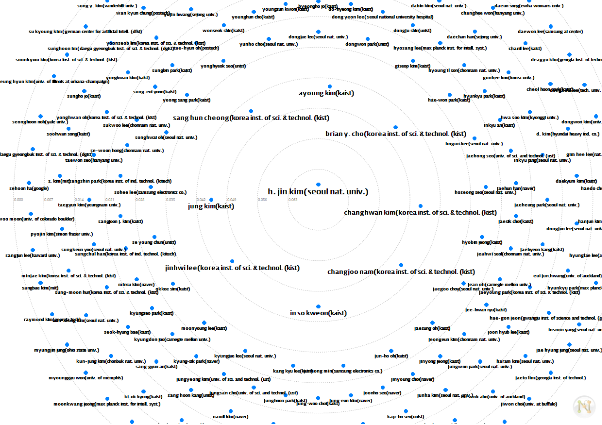
Figure 19. ICRA 2020 한국인 공저자 네트워크 시각화(Degree Centrality)
한국기관 소속의 연구자 외에도 외국기관 소속의 한국인 연구자들의 논문도 많이 발표된 것으로 나타났다. Table 6은 한국인으로 추정되는 외국 기관 소속의 연구자 명단이다.
Table 6. ICRA 2020 외국기관 소속의 한국인 연구자
4. 기관-키워드 분석 (2MODE)
기관과 키워드의 연관성 분석은 어느 기관에서 어떤 분야를 연구하는지에 대한 객관적인 자료가 될 수 있다. 논문 제1저자의 기관과 그 논문에 대한 키워드를 정리하여 기관과 키워드 간의 관계를 분석한 결과를 Figure 20에 나타내었다.
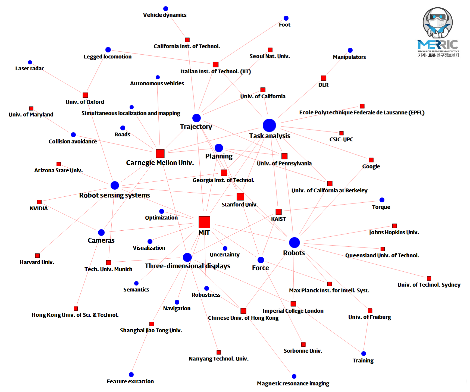
Figure 20. ICRA 2020 기관-키워드 네트워크 (2-Mode분석,Link Reduction3)
Figure 20을 살펴보면, 주요기관으로는 MIT, Carnegie Mellon Univ., Stanford. Univ., Georgia Inst. of Technol., KAIST 등이 나타나고, 키워드로는 Robots, Task Analysis, Trajectory, Planning, Robot Sensing Systems, Cameras, Force 등이 많이 나타났다. 또한, 이를 좀 더 자세히 보기 위해 빈도 5이하를 삭제한 것은 Figure 21과 같다.
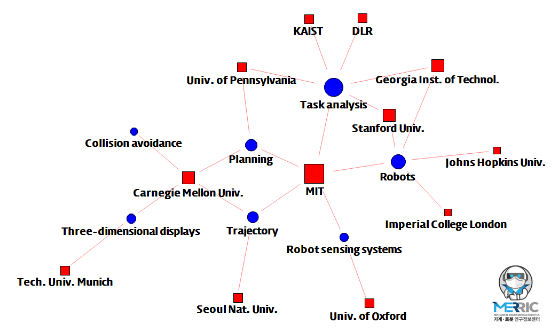
Figure 21. ICRA 2020 기관-키워드 네트워크 (2-Mode분석,Link Reduction5)
이를 통해 보면 MIT에서는 Task Analysis, Robots, Planning, Trajectory, Robot Sensing Systems 키워드의 논문이, Carnegie Mellon Univ.에서는 Planning, Trajectory, Three-dimensional Displays, Collision Avoidance가, Stanford Univ.와 Georgia Inst. of Technol. 에서는 Task analysis, Robots가,그리고 Univ. of Pennsylvania에서는 Task Analysis와 Planning에 관한 논문이 주로 발표되었다. 이처럼 기관별로 주요하게 나타나는 키워드를 Table 7과 같이 정리하였다.
Table 7. 주요 연구기관의 키워드

ICRA(IEEE International Conference on Robotics and Automation)는 전통적으로 미국과 서구의 여러 나라가 주도하는 학술대회로서, 이번 Virtual Conference로 치러진 ICRA2020에서도 미국의 논문 수가 전체 논문의 35.9%를 차지하고 있다.또한,기관별 분석을 살펴보면 논문 수 1위~6위까지는 전부 미국의 기관들이다. 그러나 몇 년 전부터는 중국이 매우 많은 논문을 내면서 독일과 프랑스, 이태리 등 유럽국가들을 제치고 2위로 급부상하였다. 이번 학술대회의 논문 편수로 본 한국의 로봇 연구는 KAIST와 서울대가 주도하고 있는 것으로 보인다. KAIST의 경우 기관별 통계에 따르면 6개의 미국기관 다음에 7위에 포함되어 있다.
이전 ICRA학회에서는 보통 Mobile Robots를 중심으로 Robot Vision, Path Planning, Motion Control의 3가지 키워드의 빈도수가 높게 나타났는데, 이번에는 “Task Analysis”라는 새로운 키워드가 가장 높은 빈도를 기록하였다. Task Analysis는 2019년에는 전혀 없었던 키워드라 이번에 새로키워드로 등록되면서 빈도수가 가장 높아진 것으로 생각된다. 이외에도 Three-dimensional Displays, Cameras, Robot Sensing Systems 등이 주요한 키워드로 등장하였다.
공저자 네트워크 분석을 통해 Dieter Fox(NVIDIA), Yun-hui Liu(Chinese Univ. of Hong Kong), Magnus Egerstedt(Georgia Inst. of Technol.), Aaron D. Ames(California Inst. of Technol.), Joel W. Burdick(California Inst. of Technol.), Vijay Kumar (Univ. of Pennsylvania), Guang-Zhong Yang(Imperial College London), Aaron T. Becker(Univ. of Houston), Ken Goldberg(UC Berkeley), Ludovic Righetti(New York Univ.), Maximilien Naveau(Max Planck Inst. for Intell. Syst.) 등의 여러 주요 연구자들이 주도하는 연구그룹들을 확인하였다.이들 주요 연구 그룹 중 2개의 그룹에는 많은 한국인 연구자들도 포함되어 있는 것을 확인하였다.또한 Degree Centrality 시각화를 통해 Dieter Fox(NVIDIA)가 가장 중심에 있으며, 두 번째 중심에 가까운 연구자로 Guang-zhong Yang(Imperial College London), Ken Goldberg(Univ. of California at Berkeley), Roland Siegwart(ETH Zurich), Vijay Kumar(Univ. of Pennsylvania)가 있으며, 중심에서 세 번째로 가까운 원에는 Aaron T. Becker(Univ. of Houston), Iulian Iordachita(Johns Hopkins Univ.), Kei Okada(Univ. of Tokyo), Li Fei-Fei(Stanford Univ.), Masayuki Inaba(Univ. of Tokyo)가 있음을 확인할 수 있다.
마지막으로 기관과 키워드분석을 통해 각 연구기관이 어떤 키워드의 연구를 주로 하는지도 확인해보았다. 주요한 기관의 키워드를 살펴보면 MIT에서는 Task Analysis, Robots, Planning, Trajectory, Robot Sensing Systems에 대한 논문을 발표하였으며, Carnegie Mellon Univ.에서는 Planning, Trajectory, Three-dimensional Displays, Collision Avoidance을,Stanford Univ.와 Georgia Inst. of Technol.에서는 Task analysis, Robots를, Univ. of Pennsylvania는 Task Analysis, Planning등의 키워드를 가진 논문을 많이 발표하였다.




전체댓글 0
.jpg)



(0).jpg)














