


서태원 교수(한양대학교 기계공학부) / taewonseo at hanyang.ac.kr
2021-05-03
| 요즘 코로나 시대를 맞이하여 전 세계적으로 배달로봇에 대한 연구가 활발해지고 있습니다. 자율주행 차량 기술을 접목해 머신러닝과 컴퓨터 비전 기술을 사용하여 물체를 감지하고, 주변 환경의 변화에 따라 움직이기까지 하는데요. 로봇을 제어하기 위해서 사용되는 스텝(STEP) 기계는 리눅스 환경에 익숙하지 않은 엔지니어들도 쉽게 임베디드 제어 프로그램을 개발할 수 있으며 협동로봇을 실시간 제어, 고속 딥러닝 추론 연산 기반 다양한 알고리즘의 연구개발이 가능합니다. 오늘 인터뷰에서 만나 보실 서태원 교수(한양대학교 기계공학부)는 최근 열린 2021년 국제전자제품박람회(CES2021)에서 STEP 활용한 새로운 두 가지 로봇 플랫폼을 공개했는데요. 로봇 모션의 원리와 로봇 설계 및 제어 대해 중점적으로 이야기해보도록 하겠습니다. 1. 현재 교수님께서 하고 계시는 주요 연구에 대한 간단한 소개 부탁드립니다. 응용 분야를 중심으로 연구 분야를 설명드리자면, 현재 연구실에서 개발하고 있는 로봇은 (1) 고층빌딩 외벽을 청소하는 로봇, (2) 계단, 장애물 등을 쉽게 극복하는 이동형 로봇, (3) 레고처럼 변형이 가능한 모듈형 로봇, (4) 수중에서 작업이 가능한 양팔형 로봇이 있습니다. 로봇이라는 것이 융합적 학문이고 산업화가 필요한 분야라는 점에서 다양한 연구기관, 업체와 협력으로 과제를 진행하고 있습니다. 2. 최근 CES2021에 두 가지 새로운 개념의 로봇 플랫폼을 공개하셨는데요. 연구하신 로봇에 대한 알고리즘에 대해 자세한 설명 부탁드립니다. 이번 CES에는 STEP과 dodo 두 종류의 로봇을 전시하였습니다. STEP은 바퀴의 변형을 이용하여 장애물을 극복하는 로봇으로 배송 로봇에 사용할 수 있습니다. dodo는 기울어진 스포크 휠을 가지고 있는데 집에서 사용하는 것을 목적으로 하고 있습니다.  3. 지난해 CES2020 외벽청소로봇 에델스트로(Edelstro)으로 10대 기계기술상을 수상도 하셨는데요. 외벽청소로봇 에델스트로 플랫폼 대해 자세한 설명 부탁드립니다. 에델스트로는 다른 로봇과 비교하여 곤돌라에 쉽게 결합하여 대면적을 청소하는 로봇입니다. 로봇을 개발할 때에 가장 중요한 부분이 쉬운 사용성이라고 생각합니다. 간단한 기구이지만 제어알고리즘, 인공지능 등이 결합되어 좋은 청소 성능을 보이고 있습니다. 고층 빌딩의 외벽을 청소하는 작업은 매우 고되고 위험한 작업입니다. 이러한 고위험, 극한조건 작업 들을 로봇이 대신하게 된다면 사람은 좀 더 편하고 창의적인 작업들을 할 수 있습니다. 이는 로봇설계공학연구실의 연구 비전과 일치합니다. 제가 대학원 생활을 했던 서울대학교 연구실에서 아이디어가 시작되었고, 2018년부터 미래선도기술개발사업을 공동연구로 시작하여 현재까지 진행하고 있습니다. 최근에 두바이 국제건축기자재박람회, 대한민국R&D 산업기술대전, 미국CES 등에 전시를 진행하였습니다. Edelstro는 독일어로 보석을 뜻하는 Edel과 장인을 뜻하는 Maestro의 합성어입니다. 건축주의 입장에서 본인의 건물은 보석과 같이 소중할 테이고, 이것을 장인의 손길로 관리해 주기를 원할 것입니다. 항상 사용자에 입장을 고려하여 설계하여야 하는 공학설계자의 마음을 담았습니다. 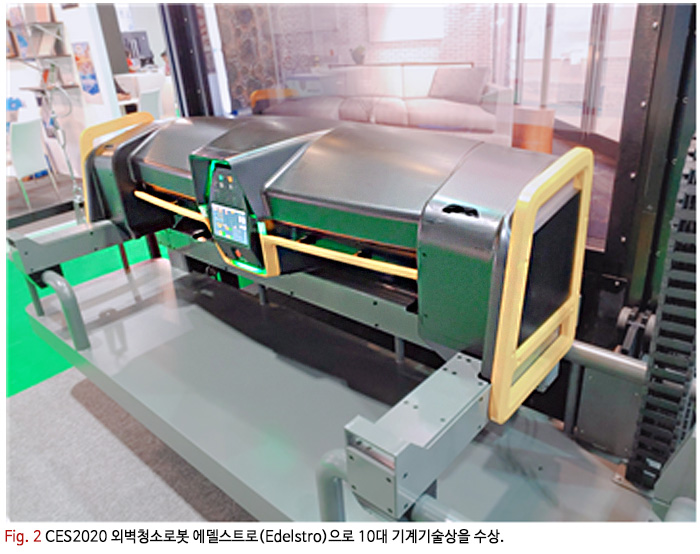 4. 로봇 제어에 쓰이는 기계는 버전이 바뀔 때마다 업그레이드되고 있습니다. 현재 사용하신 로봇 제어 프로그램 중 보완해야할 점은 없는 건가요? 연구실에서는 범용 제어기(Compact Rio, dSPACE 등)을 사용하고 있습니다. 연구원들이 알고리즘을 개발하여 적용하는 데에 편한 플랫폼입니다. 하지만, 상용화를 위해서는 전용제어기를 개발하는 것이 필수입니다. 관련하여 에델스트로 같은 경우는 씨에스캠 회사와 협력하에 제어기를 제작하고 있습니다. 5. 교수님께서 다양한 R&D 참여과제를 수행하고 계시는데요. 그 중 가장 기억에 남는 공동과제 연구가 있으신지요. 현재 진행하고 있는 Edelstro 연구가 가장 기억에 남습니다. 연구팀으로는 씨에스캠, 크리니트, 서울대학교, 카이스트, 경기대학교가 참여하고 있습니다. 씨에스캠와 크리니트는 1세부에서 상용화 기술을 맡고 있습니다. 서울대학교와 카이스트는 설계, 경기대학교는 제어 파트를 맡아서 연구를 하고 있습니다. 다양한 기관이 열심히 협동하여 연구를 진행하고 있습니다. 6. 매년 빠르게 성장하고 있는 자율주행, 인공지능(AI) 등 첨단기술을 접목하여 다양한 로봇들이 선보이고 있습니다. CES 참가하시면서 다양한 기술들을 보셨을 것 같은데요. 눈여겨보신 아이템이 있으신가요? 사실 이번 CES는 온라인으로 진행되어 실제 기술을 확인하기는 어려웠습니다. 내년에도 출품을 할 계획인데, 다양한 기술을 꼭 확인하면 좋겠습니다. 전시회에 참여하여 가장 보람있었던 일은 많은 사용자들이 본 제품을 원한다는 것입니다. 로봇을 개발할 때에 가장 중요한 것은 수요가 있어야 한다는 것입니다. 아무리 좋은 성능을 가지는 제품을 개발한다고 해도, 수요가 없다면 시장을 만들 수 없습니다. 이번에 STEP, dodo에 관심이 많아 외국 관련 업체들과 화상으로 미팅을 수행하였습니다. 7. 서비스 로봇을 만든 업체 중 국내기업과 국외기업이 어떤 제조 방식으로 연구되어 상용화되는지 궁금합니다. 서비스 로봇은 개인 서비스 로봇과 전문 서비스 로봇으로 나눌 수 있겠습니다. 개인 서비스 로봇은 집에서 사용할 수 있는 로봇인데, 큰 시장에 비해 아직 성공 사례가 많지 않습니다. 전문 서비스 로봇은 사람이 하기 힘든 일들을 대체할 수 있는 로봇을 개발하는 것인데, 최근 배달로봇 등에 수요가 많이 있습니다. 국내에서는 현대로보틱스, 유진로봇 등이 대표적인 기업이라 할 수 있고, 해외에도 많은 기업들이 도전을 하고 있습니다. 한양대 로봇설계공학연구실에서 개발하는 STEP, Edelstro가 전문 서비스 로봇이라 할 수 있고, dodo는 개인 서비스 로봇을 위한 연구라고 할 수 있겠습니다. 8. 교수님께서 생각하시는 서비스 로봇 플랫폼 개발을 활용한 여러 연구들에 대한 국내상황과 국외상황을 구체적으로 비교해주신다면 어떤 실정인가요? 서비스 로봇에 대한 수요는 많지만, 아직 시장을 점유하고 있는 제품은 나오지 않는 상황입니다. 최근 로봇으로 커피를 내린다던지, 치킨을 튀긴다던지 다양한 각도로 로봇을 응용하려 하고 있습니다. 개발하고 있는 Edelstro, STEP, dodo가 서비스 로봇의 일상화에 도움이 되었으면 좋겠습니다. 9. 연구 진행 중 어려운 점이 있었다면 어떤 점이었으며, 어떻게 해결해 오셨는지 알려주세요. 한양대 로봇설계공학연구실의 3대 정신으로는 “프로정신”, “책임감”, “공동체의식”을 강조하고 있습니다. 특히, 공동체의식을 바탕으로 연구원들이 재밌게 협업을 하며 프로젝트를 하고 있습니다. 현재 20명의 연구원들이 연구실에서 열심히 하고 있는데 항상 공동체의식을 바탕으로 서로 도와가며 연구하는 것이 중요하다고 생각하고 있습니다.  10. 2014년 미국기계학회에서 최우수 논문상을 수여하셨는데요. 어떤 논문인지 궁금합니다. 2009년부터 미국 카네기멜론대학 나노로보틱스연구실에서 박사후과정을 진행하였습니다. 당시 등반로봇이 큰 이슈였는데, 장애물 극복 능력에서 제한이 많았습니다. 저는 설계적 관점에서 유연한 메커니즘을 이용하면 장애물을 쉽게 극복할 수 있음을 증명하였습니다. 당시 카네기멜론 대학의 메틴 씨티 교수와 공동으로 연구를 진행하였으며 운이 좋아 상을 받게 되었습니다. 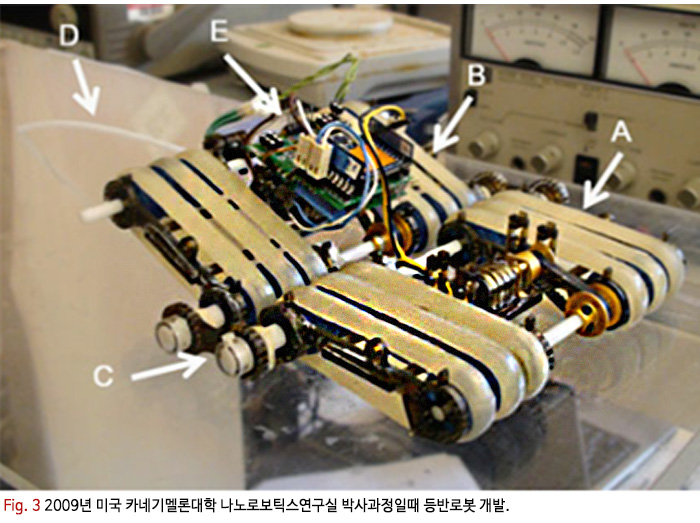 11. 이런 연구에 힘입어 앞으로 연구 계획 중인 연구나 또 다른 목표가 있으신지 궁금합니다. STEP과 dodo는 아직 concept모델 단계입니다. 이 두 플랫폼에 대한 연구를 지속해서 상용화까지 진행하는 것이 목적입니다. Edelstro는 현재 상용화에 근접하고 있습니다. 하지만, 곤돌라가 있어야 한다는 단점이 있습니다. 관련하여 Edelstro M2를 연구하고 있는데 이 제품은 곤돌라가 없는 경우에도 쉽게 사용이 가능합니다. 최근 국제 연구로 모듈형 로봇에 대한 연구를 하고 있습니다. 모듈형 설계를 통하여 하나의 로봇이 다양한 형태를 가지게 됩니다. 레고를 상상하시면 됩니다. 현재 트러스형 모듈 로봇과 트랙형 모듈 로봇을 개발하고 있고 응용은 사고현장이나 선박 검사 등에 응용하려 합니다. 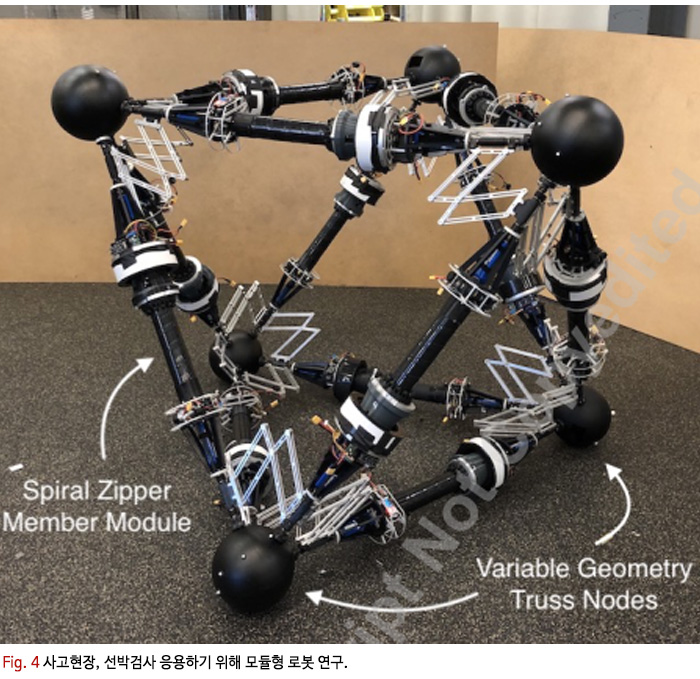 12. 연구실 소개를 간단히 해 주신다면? 한양대학교 로봇설계공학연구실은 2018년에 개설된 신설 연구실입니다. 현재 19명의 대학원생이 같이 연구를 하고 있고, 이 중 1명은 산학파견과정, 3명은 학연과정생입니다. 우리 연구실은 기계공학의 핵심인 “설계”를 연구하려 하고 있고, 응용 분야는 서비스로봇, 모바일로봇, 산업용로봇입니다. 로봇을 연구하다 보면 인공지능, 제어, 최적화 등 다양한 방향으로의 연구가 필요한데, 그래도 “설계연구자”라는 중심을 가지고 연구를 진행하고 있습니다. 연구실의 3대 정신으로는 “프로정신”, “책임감”, “공동체의식”을 강조하고 있습니다. 특히, 공동체의식을 바탕으로 연구원들이 재밌게 협업을 하며 프로젝트를 하고 있습니다. |
- 배달로봇 플랫폼
- 스텝(STEP) 기계
- 임베디드 제어 프로그램
- 로봇 모션의 원리
- 로봇 설계 및 제어




전체댓글 0













