실험실소개
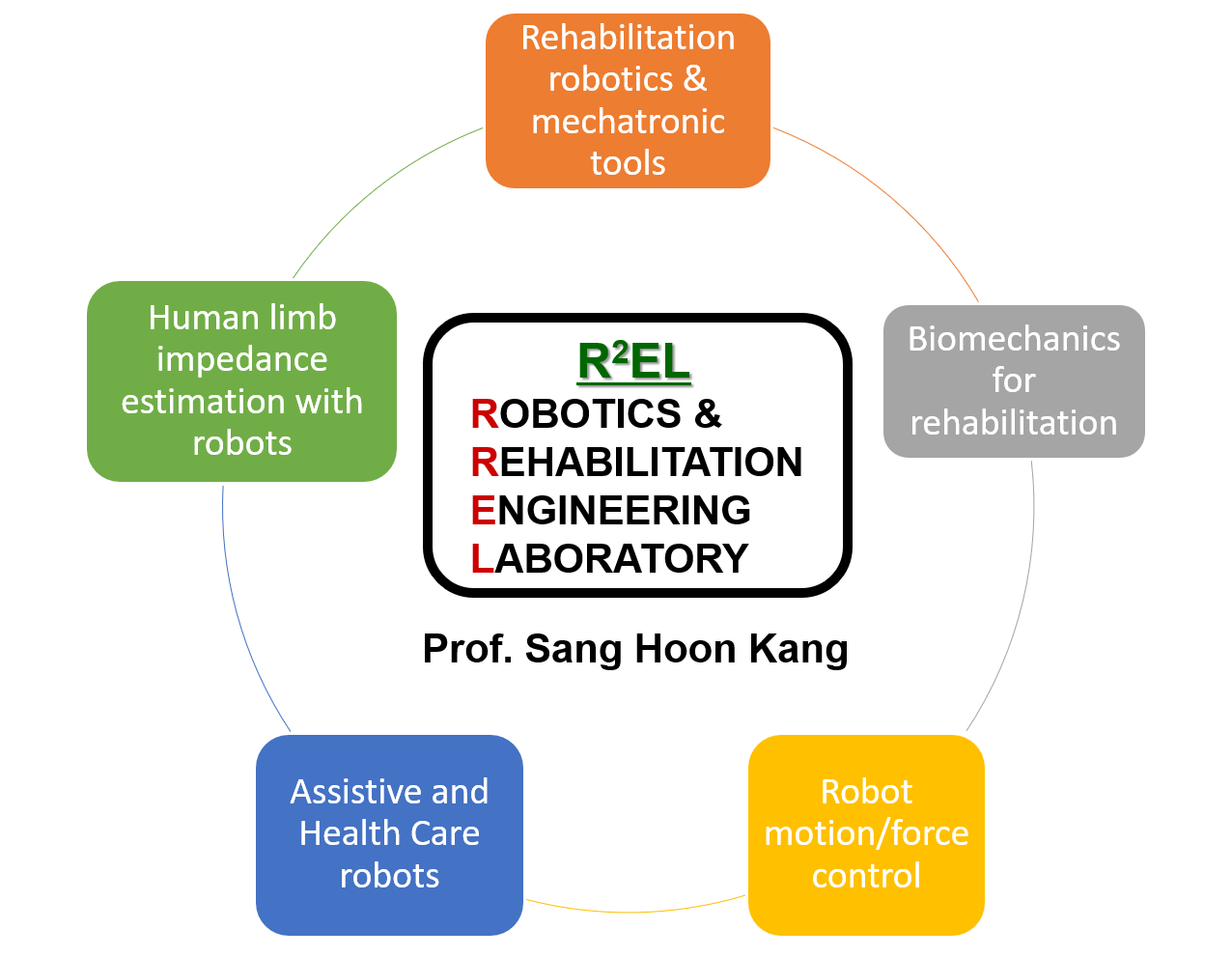
R2EL aims to research and develop medical/rehabilitation/diagnostic robotic and mechatronic systems that can be used in real clinics. With this aim, currently, we are studying on various robotics and rehabilitation engineering areas including robust nonlinear observers, real-time biofeedback systems, and upper/lower-limb multi-joint/DOF diagnostic and measurement devices and methods.
연구분야
Rehabilitation-Robotics
Rehabilitation robotics aims to apply robotic technology to rehabilitation of patients with neuromuscular, musculoskeletal, and/or mental disease and/or injury to improve their ability and eventually help them return to the job of their choice. In a narrow sense, it is a truly interdisciplinary and translational research area combining robotics, biomechanics, system identification, and physiology (and many other relevant disciplines) to complement the current clinical practice by providing objective robotic assessment and intensity-adjustable long-duration treatment. In a broad sense, rehabilitation robotics benefits our community, nation, and, eventually, the world. With the development of aforementioned technologies for the clinical use, it is expected that the patients regain their ability for the activities of daily living (ADL) and for occupation, the family members of the patients can return to their job, and, consequently, the social and economic burden to the community, nation, and the world can be reduced.
Research topics and tools
- Robotic assessment tools
- Rehab-mechatronic training devices
- Robotic devices for the study of underlying mechanism of disease or injury
- Biomechanics, system identification, signal processing and other relevant technologies for rehabilitation
- Robot design and motion/force control
- Assistive and health care robotics
연구성과
Kang, H., Lee, S. J., Sang Hoon Kang (Corresponding Author).
“Stability of a robust interaction control for single-degree-of-freedom robots with unstructured environments.”
Intelligent Service Robotics, , 2020
, ,Vol. 0No. 0 ,pp. 0 ~ 0(SCIE, 0:0.0
Lee, S. J., Jin, D., Sang Hoon Kang., Gaebler-Spira, D., & Zhang, L. Q.
“Combined Ankle/Knee Stretching and Pivoting Stepping Training for Children with Cerebral Palsy.”
IEEE Transactions on Neural Systems and Rehabilitation Engineering,, 2019
, ,Vol. 0No. 0 ,pp. 0 ~ 0(SCIE, 0:0.0
J. Liu, Y. Ren, D. Xu, Sang Hoon Kang, L. -Q. Zhang
“EMG-based real-time linear-nonlinear cascade regression decoding of shoulder, elbow and wrist movements in able-bodied persons and stroke survivors
IEEE Trans. Neural Syst. Rehabil. Eng. Accepted, 2019
, ,Vol. 0No. 0 ,pp. 0 ~ 0(SCIE, 0:0.0