-
-

-

- HOME
- 연구동향
- MERRIC인
- 메릭웨비나
- 공학DB
- 문헌정보
- 기계로봇소식
- MERRIC은?
- 회원가입
- 로그인

- 물성치테이블
- 용어사전
- 실험실소개
| 지도교수 | 배준범 |
|---|---|
| 전공분류 | 로봇공학(Robotics) |
| 주소 | Rm. 801-9, Engineering Building 5 (Bld. 112), UNIST |
| 전화 | |
| 홈페이지 | http://birc.unist.ac.kr/ |
In this laboratory, human-robot interaction systems for virtual reality, tele-operation, and rehabilitation are investigated using robotics, control, and advanced sensing technologies. Wearable systems were developed for military use, daily life support, and rehabilitation. These wearable systems, however, feature rigid structures and actuators, which were usually employed in conventional robotics research. The design, manufacture, and control of such systems may be appropriate from the point of view of a ‘robot’, but have not been widely applied in practice because they are heavy, hard, and difficult to wear from the point of view of a ‘human’. To overcome these issues, we have sought to develop innovative and practical wearable systems by comprehensive research with human-centered design and control of the wearable systems; the wearable systems are developed from the point of view of a ‘human’ not a ‘robot’. Also, structures and mechanisms used by animals and plants have informed the development of wearable human-robot interaction systems, creating the discipline of biomimetic robot research.
Research
-
Many researchers have long dreamed of developing wearable systems that enhance individual abilities. Practical studies on such systems started from the early 2000s due to the technology development in design and control. Recently, various advanced wearable systems have featured microelectromechanical sensors, wireless networks, battery technologies, and so on.
The wearable exoskeleton systems were developed for military use, daily life support, and rehabilitation. These wearable systems, however, feature rigid structures and actuators, which were usually employed in conventional robotics research. The design, manufacture, and control of such systems may be appropriate from the point of view of a ‘robot’, but have not been widely applied in practice because they are heavy, hard, and difficult to wear from the point of view of a ‘human’. Also, their performance and effectiveness are limited; again, the actuators and transmission systems are heavy and bulky. To overcome these issues, we have sought to develop innovative and practical wearable systems by comprehensive research with human-centered design and control of the wearable systems; the wearable systems are developed from the point of view of a ‘human’ not a ‘robot’. Also, structures and mechanisms used by animals and plants have informed the development of wearable human-robot interaction systems, creating the discipline of biomimetic robot research.
Soft Sensors and Actuators
Research Group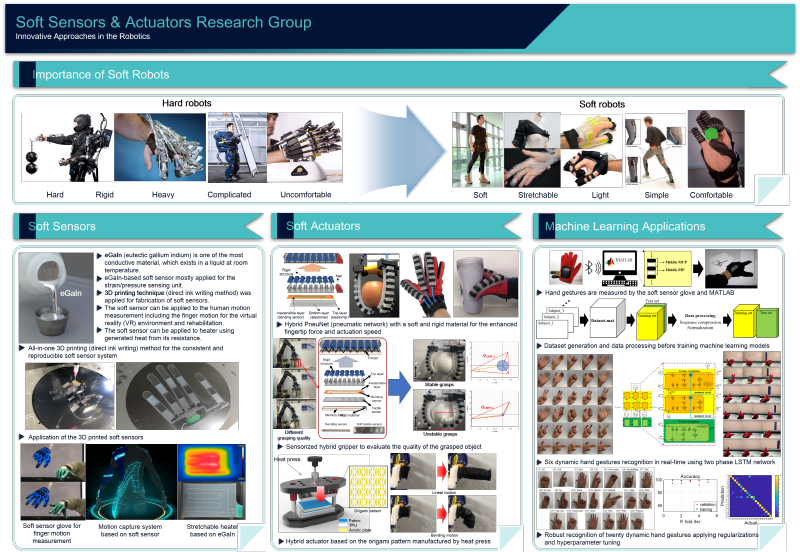
Bio-inspired Robots
Research Group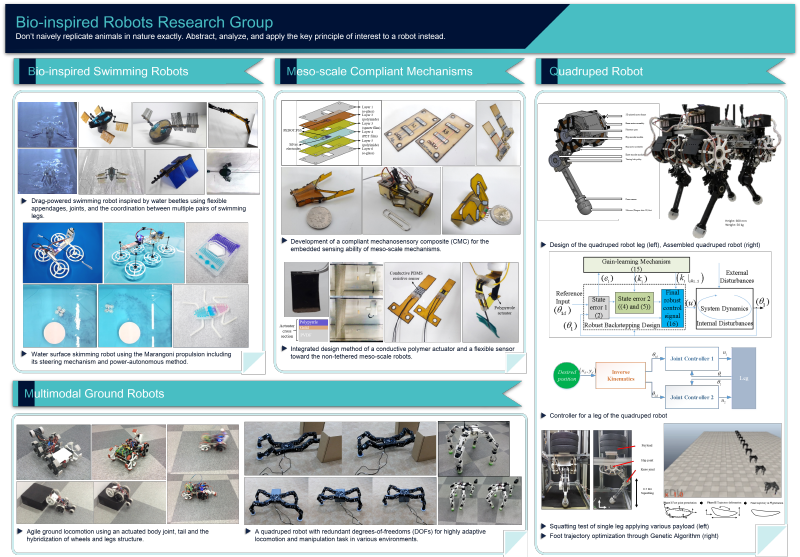
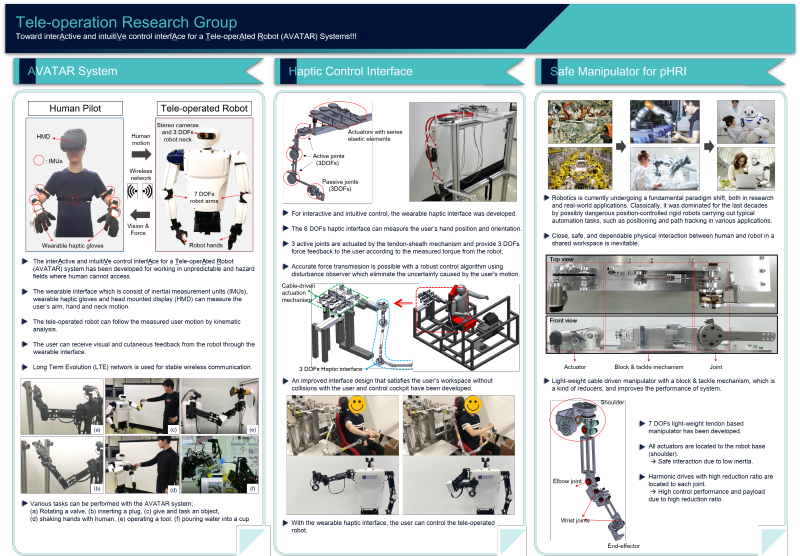
Tele-operation Research Group
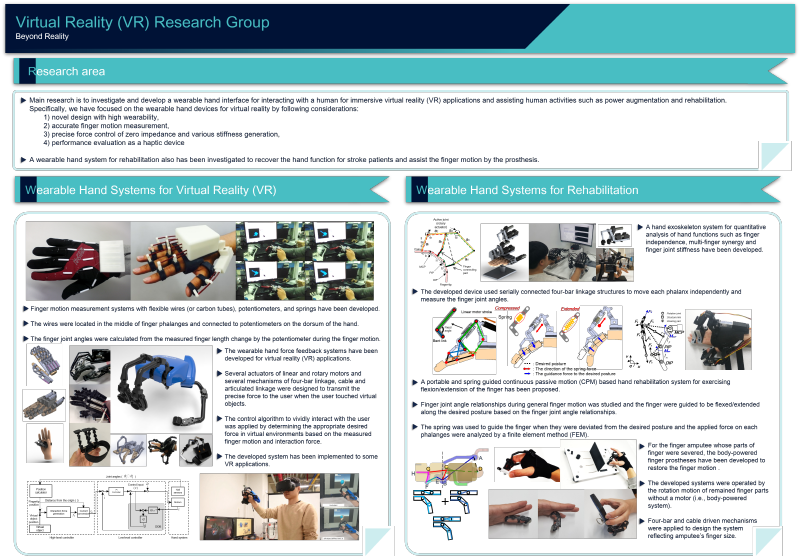
Virtual Reality Research Group
Deep Learning based Real-time Recognition of Dynamic Finger Gestures using a Data Glove
IEEE Access, 2020 , ,Vol. 0No. 0 ,pp. 0 ~ 0(SCIE, 0:0.0
D. X. Ba*, and J. BAE
A Nonlinear Sliding Mode Controller of Serial Robot Manipulators with Two-level Gain-learning Ability
IEEE Access,, 2020 , ,Vol. 9No. 0 ,pp. 189224 ~ 189235(SCIE, 0:0.0
J. Oh, S. Kim, S. Lee, S. Jeong, S. H. Ko*, and J. BAE
A Liquid Metal Based Multimodal Sensor and Haptic Feedback Device for Thermal and Tactile Sensation Generation in Virtual Reality,
Advanced Functional Materials,, 2020 , ,Vol. 0No. 0 ,pp. 0 ~ 0(SCIE, 0:0.0













