열린실험실
열린실험실 게시판 내용
| 열린실험실명 |
고려대학교 지능로봇 연구실 |
| 등록일 |
2005-12-21 오전 11:41:55 |
■
지능로봇 연구실 소개
|
http://mecol.korea.ac.kr
|
|

|
|
|
|
고려대학교 공과대학 기계공학과의 지능로봇 연구실은 1993년 3월에 송재복 교수의 부임과 동시에 설립되었다. 현재
이동로봇의 주행,
지능형 로봇시스템의 설계 및 제어, 햅틱스, 모션제어 등 로봇과 메카트로닉스에 관련된 분야에서 활발한 연구개발을
수행하고 있다. 이러한
연구개발의 성과로 현재까지 150여 편의 논문을 국내외 저널 및 학술대회에 발표하였으며, 5개의 특허를
취득하였거나 출원 중이다.
지능로봇 연구실은 다음과 같은 특징이 있다.
|
|
|
- 지능로봇 관련
각종 프로젝트에 참여 가능
- 연구원에게 다양한
장학금 및 학비보조 지원
- 지능로봇 및
메카트로닉스의 여러 분야에 대한 경험 가능
- 다양한
기술세미나의 개최
- 영어로 학위논문
작성
- 논문 및 특허
취득 장려
- 다양한 취업
기회의 제공
- 타기관과의
공동연구
|
|
|
| ■ 주요연구활동
|
 Stewart Platform을 이용한
Motion Simulator Stewart Platform을 이용한
Motion Simulator
|
|
주행모델 |
|
 자전거, 자동차, 놀이공원 열차 등의 동역학을 계산하여 구현한다. 자전거, 자동차, 놀이공원 열차 등의 동역학을 계산하여 구현한다.
|
|
주행모델 결여시 현실감이 저하된다. |
|
대화형 시나리오 |
|
사용자의 의지에 의한 입력이 시나리오에 반영된다. |
|
주행 동역학의 실시간 구현 |
|
대화형 시나리오를 위해서는 주행 동역학을 실시간으로 계산하여야 한다. |
|
많은 계산이 필요하므로 중요한 주행 동역학의 추출 및 단순화가 필요하다. |
|
| |
|
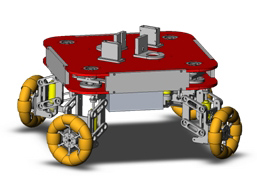
전방향
이동로봇이란?
일반적인 이동로봇은 2차원 평면에서 2자유도의 운동을
하므로 평면에서 가능한
3자유도(병진 2자유도, 회전 1자유도)의 운동을 완전히 구현할 수 없다. 따라서, 주차나 복잡한 환경에서의 움직임이
제약된다. 이러한
단점을 보완하여 2차원 평면에서 3자유도 운동이 가능한 로봇을 전방향 이동로봇이라 한다. 즉, 전방향 이동로봇은 로봇 몸체의
방향을
변화없이 전후, 좌우, 회전의 운동이 동시에 가능한 장점이 있다.
|
|
|
|
Navigation
 자율적이면서
self-contained한 이동로봇 자율적이면서
self-contained한 이동로봇 |
| 자율성(Autonomy): 외부의 도움 없이 스스로 행동을 결정함 |
| Self-containedness: 모든 구성요소가 로봇 내부에 포함되어 있음. |
|
지도작성(map building), 장애물회피(obstacle avoidance),
위치측정(localization) | |
|
위치추정
(Localization)
|
위치추적은 여러 센서 정보와 비콘 등의 표식(landmark)를
이용하여 작업환경 내에서
로봇의 절대위치를 파악하는 것을 말한다. 로봇이 주행하는 동안 여러 원인(바퀴와 지면과의 미끄러짐 현상, 바퀴
직경의 변경 등)로 인해 오차가
발생하므로 주행이 진행될수록 로봇의 위치에 오차가 발생하게 되고, 이에 따른 보정이 필요하게 된다.
위치추적을 수행하는 기법에는 칼만필터, 매칭
등의 여러 기법이 있지만, 본 연구에서는 신뢰성이 높으며, 최근 들어서 많은 각광을 받고
있는 확률기법을 활용한다. |
|
|
|
border=0>
확장칼만필터(Extended Kalman Filter, EKF) |
| - 특징기반 위치추정 |
|
- 추출된 정보(자연표식)와 엔코더 정보를 융합 |
|
- 복잡하지 않은 환경에서 안정적인 성능 |
|
- Kidnapping 문제 해결 불가 |
|
| |
몬테카를로
방법(Monte-Calro method)
|
- 미지의 환경에서 로봇의 위치 추정 |
|
- 센서 보정을 통한 위치 정밀도 향상 |
|
- 확률 분포를 사용하여 로봇의 위치를 추정 |
|
- 화률 밀도를 이용하여 샘플 추출 | |
border=0>
|
|
| | | | | |
|
| |
|
* 촬영에 협조해주신 고려대학교 공과대학 기계공학과의 지능로봇 연구실원 분들께 감사드립니다.
지면관계로 대략적인 내용만 실었습니다. 보다 자세한 내용은 실험실 홈페이지
(http://mecol.korea.ac.kr)를
참고하세요.